Motion compensation in robotic surgery
Overview
Motion compensation in minimally invasive robotic surgery refers to a process by which the robot visually tracks and compensates the motion (e.g. respiratory or beating heart) of the target organ, thus automatically controlling the relative positioning of the surgical instrument and the surface of the target anatomical area, therefore facilitating and increasing the precision of specific surgical manipulations.
Specifically, in minimally invasive beating heart surgery, introducing such motion compensation functionality is of particular importance. Robotic-assisted Coronary Artery Bypass Graft (CABG) surgery is a relatively new surgical treatment for patients with coronary disease. The goal is to restore normal blood flow to coronary arteries which present blockage. It is the next step of open-chest CABG (conventional bypass), where the use of the robot enables totally endoscopic minimally invasive access to the heart. During the operation the heart remains beating and is, typically, stabilized mechanically in order for the surgeon to operate on it. This, however, presents some complications due to the enforced stress on the heart, such as hemodynamic instability, lower cardiac output, stroke volume and arterial pressure, whereas residual motion still remains.
Motion compensation, in that case, refers to the virtual stabilization of the beating heart, along with the mechanical synchronization of the robotic arms with the pulsating heart surface and their shared control with the surgeon. The stabilized image of the heart is presented to the surgeon to operate on, while the heart motion is compensated by the robot and the surgeon essentially operates on a virtual still heart. This technology obviates the need for cardiac stabilizers and may have positive effects on CABG surgery, such as shorter operating time, better hemodynamic stability and fewer conversions to open-chest surgery
Our research work aims at providing a unifying framework under which the image rectification, the mechanical synchronization and the shared control problems can be combined seamlessly. Furthermore, it may serve as a baseline upon which more complicated assistive modes are built, e.g. active and haptic assistance, which aim at further enhancing the surgeon’s performance.
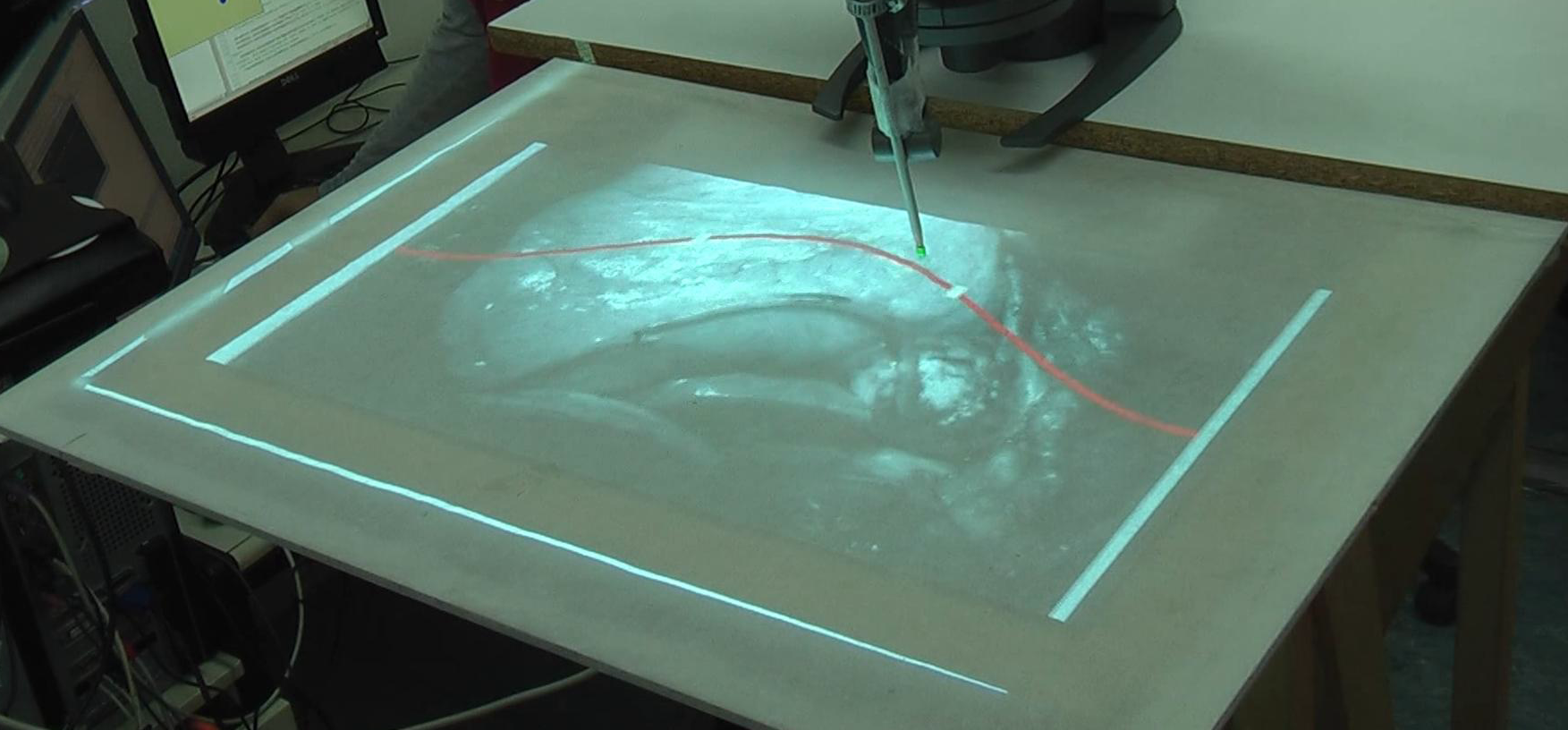
Figure showing the first experimental platform for motion compensation trials: View of the slave robotic device and the simulated surgical field. The robot tracks a red line on a beating heart image projected onto a semi-transparent screen from a projector underneath the screen.
People

Constantinos Tzafestas

George Moustris
Publications
Moustris, G P; Mantelos, A I; Tzafestas, C S, “Active motion compensation in robotic cardiac surgery Conference,” 2013 European Control Conference, ECC 2013, 2013, ISBN: 9783033039629.
Moustris, G P; Mantelos, A I; Tzafestas, C S, “Enhancing surgical accuracy using virtual fixtures and motion compensation in robotic beating heart surgery,” 2013 21st Mediterranean Conference on Control and Automation, MED 2013 – Conference Proceedings, 2013, ISSN: 1050-4729.