
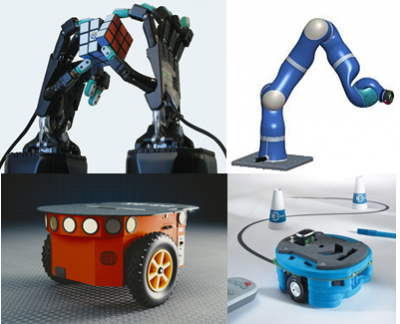
Robotics II: Intelligent Robotic Systems
filby 2019-07-08T13:50:53+00:00Analysis of Integrated Robotic Systems: control architectures, task modeling and planning, robot programming and supervision, robot sensing. Dexterous Robot Manipulation: redundant robot manipulators, cooperating robots, dexterous robot hands, kinematic/static analysis and control, manipulability, force/impedance control. Intelligent Mobile Robotics: elements of mechatronic design (locomotion, sensors), kinematic modeling, control architectures, environment representation, perception and localization, sensor fusion, path planning, robot learning. Telerobotics and Applications.

Computer Vision
filby 2025-11-26T13:30:08+00:00Introduction to the theory of fundamental problems in computer vision, synopsis of evidences from biological vision, mathematical models and computational algorithms for their solution, and description of selected applications. Visual sensors and image formation. Spatio-temporal processing of visual signals: Multidimensional linear filters and Fourier/Gabor analysis. Morphological operators and nonlinear filters. Multiscale image analysis with linear (Gaussian scale-space) and nonlinear methods (geometric diffusion). Detection of edges and other geometric features. Analysis of shape and texture. Motion estimation. Stereopsis and multiview geometry. Curve/surface evolution, active contours, and levelsets. Graph-theoretic methods. Image segmentation. 3D reconstruction. Object recognition. Applications in artificial intelligence, biomedicine, robotics, digital arts, and internet.

Robotics I: Analysis – Control – Laboratory
filby 2019-07-08T13:53:16+00:00Introduction to Robotics: Technological aspects, types of robots, application areas. Kinematic, static and dynamic analysis of robotic manipulators. Trajectory planning and control of robots. Linear local joint PID control, nonlinear computed-torque control, force/impedance control and hybrid control of robots. Introduction to adaptive and robust control of robots. Robot programming. Laboratory training: continuous and discrete control of a robot joint, linear and nonlinear control of an articulated inverted pendulum, programming of a robotic cell, programming and control of robotic manipulators (a serial linkage 6 dof manipulator and a SCARA-type robot).

BabyRobot Participation in the Athens Science Festival
filby 2018-05-14T08:02:16+00:00The BabyRobot team attended the “Athens Science Festival 2018”. [...]
Digital Signal Processing
filby 2021-07-21T16:39:45+00:00Εισαγωγή στην θεωρία των θεμελιωδών προβλημάτων της ψηφιακής επεξεργασίας σηματων (digital signal processing - DSP), στα διακριτά συστήματα και υπολογιστικούς αλγορίθμους για την επίλυση τους, και σε επιλεγμένες εφαρμογές κυρίως σε ακουστικά σήματα (φωνή, μουσική) και συνοπτικά σε βιοϊατρικά σήματα.
Circuit Theory
filby 2018-05-21T12:19:26+00:00Electric circuits, models and circuit elements. Generalized formulation of Kirchhoff's laws, graph theory, node analysis, loop analysis, tableau analysis, modified node analysis, state equations. Network functions, poles and zeros, equivalent representations, controllability, observability, passivity, stability, sensitivity. Time-domain and frequency domain response, sinusoidal steady-state analysis, Bode diagrams, Nyquist diagrams. Multiports and multiport networks. Two-ports: representations, conversions, terminated two-ports, interconnected two-ports, reciprocal and symmetric two-ports, two-port stability and passivity analysis. Switched capacitor circuits.