Robotics I: Analysis – Control – Laboratory Robotics I: Analysis – Control – Laboratory Semester: 7th
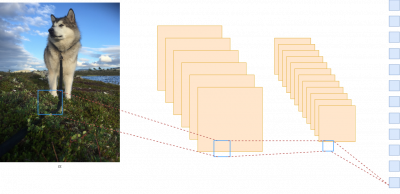
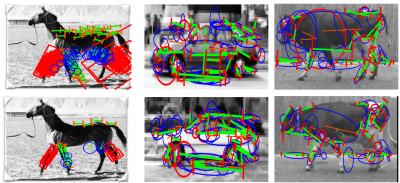
Theoretical Methods for Computer Vision and Signal Processing Theoretical Methods for Computer Vision and Signal ProcessingGraduate