Child Robot Interaction
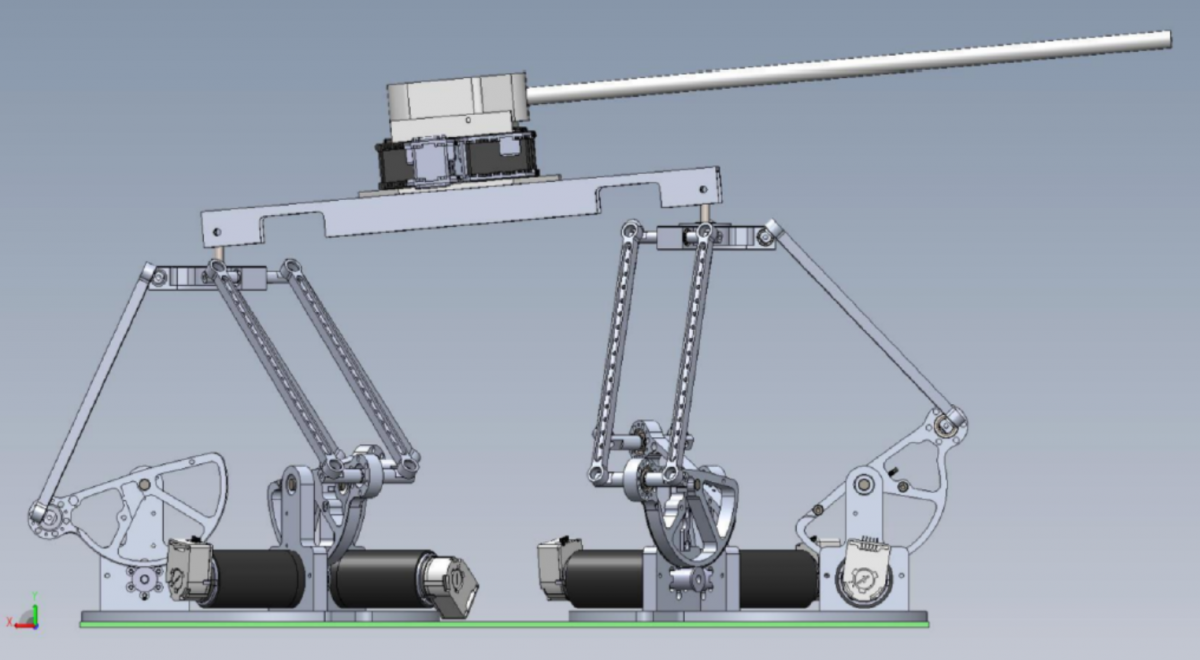
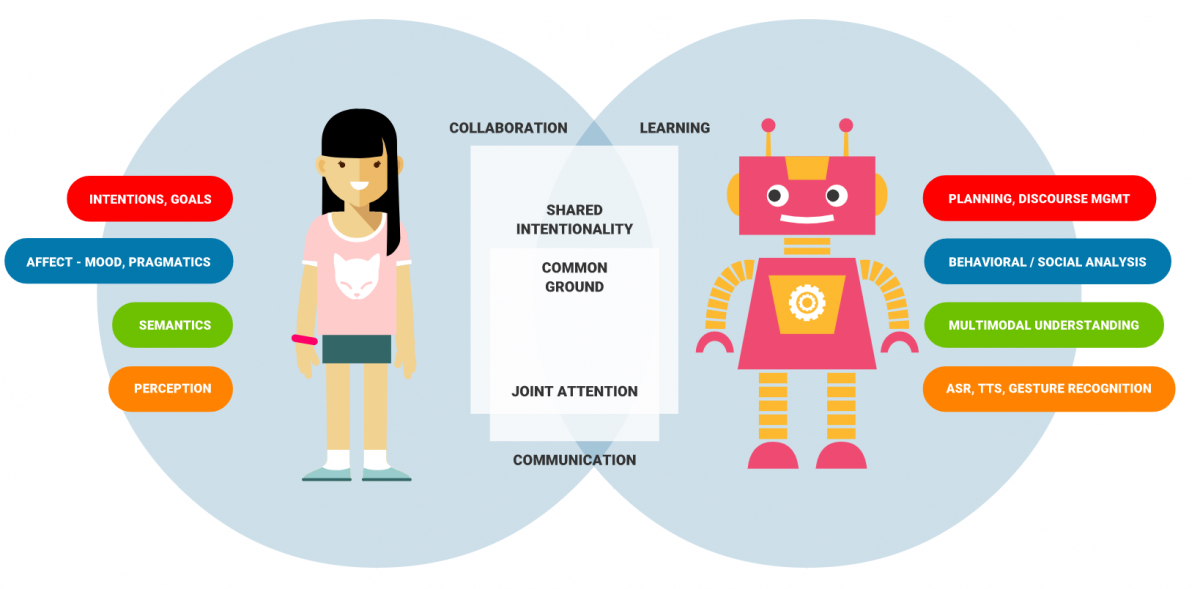
filby 2018-07-31T08:20:49+00:00Child Robot Interaction Figure 1. Our Child [...]
Child Robot Interaction Figure 1. Our Child [...]
We propose a graph clustering approach for image segmentation by developing diffusion processes defined on arbitrary graphs.
We focus on recovering aspects of vocal tract’s geometry and dynamics from speech, a problem referred to as speech inversion.
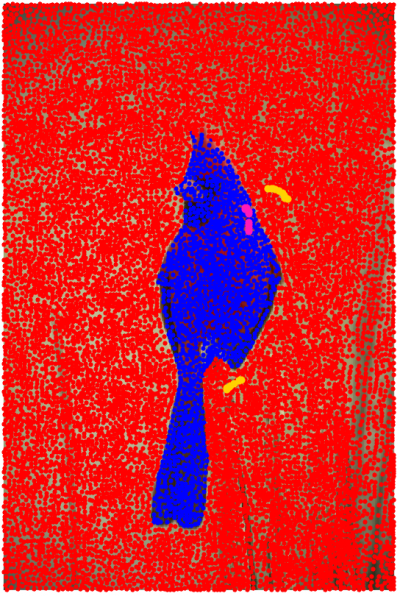
We pursue a concise texture modeling, analysis and segmentation system for generic natural images.
We investigate multigrid techniques for the solution of the time-dependent PDEs of geometric active contour models in Computer Vision.
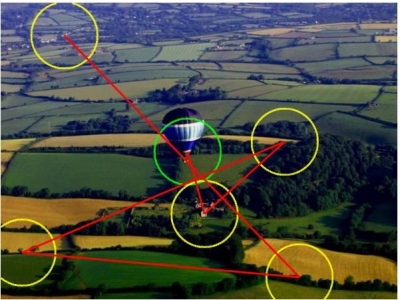
Using an information-theoretic approach to study bottom-up spatial saliency, we show how Bayesian surprise can be interpreted to explain spatial saliency.
We have developed highly adaptive multimodal fusion rules based on uncertainty compensation which are compatible with synchronous and asynchronous multimodal interaction architectures.
We have been working on PDE and wavelet-based techniques for the digital restoration of missing parts in paintings.
We are working on microphone array processing and distant speech recognition, aiming to create hands-free, voice-enabled interfaces for home automation control.