
(+30) 210-772-3687
- ktzaf@cs.ntua.gr
- Office 2.1.11
Research Interests
Robotics
Cognitive Assistive Robotics
Human-Robot Interaction
Haptics and Telerobotics
Medical and Surgical Robotics
Virtual Reality
Intelligent Robot Control
Robot Motion Planning
Robot Learning
Biosketch
Costas S. Tzafestas is a Professor of Robotics at the School of Electrical and Computer Engineering, National Technical University of Athens. He holds an Electrical and Computer Engineering Degree from the National Technical University of Athens (1993), as well as a D.E.A. (1994) and Ph.D. (1998) Degrees on Robotics from the Université Pierre et Marie Curie (Paris 6), France. Before joining NTUA in 2003, he served as a Research Associate at the Institute of Informatics and Telecommunications of the National Center for Scientific Research “Demokritos” (Greece). His main research interests include cognitive assistive robotics and human-robot interaction, as well as haptics and telerobotics with applications in the field of medical and surgical robotics. His research spans topics related to intelligent robot control, interactive motion planning and robot learning for advanced/dexterous manipulation, also including applications in mobile and field robotics. He has authored or co-authored more than 180 scientific publications and has participated as Project Coordinator, PI, or Scientific Manager in several European and national research projects in the above fields. He currently serves as an Executive Board Editor of the Journal of Intelligent and Robotic Systems. He is also a member of the Executive Committee of the Hellenic Robotics Center of Excellence (HERON), funded through the EU Teaming for Excellence programme.

Publications
2026 |
George Moustris, Costas Tzafestas A Shared-Control Framework for A Human-Robot Front-Following Behaviour in Unknown Dynamic Environments Journal Article International Journal of Social Robotics, 18 (2), pp. 31, 2026, ISSN: 1875-4791. Abstract | BibTeX | Links: [PDF] @article{Moustris2026, title = {A Shared-Control Framework for A Human-Robot Front-Following Behaviour in Unknown Dynamic Environments}, author = {George Moustris and Costas Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Moustris_et_al-2026-International_Journal_of_Social_Robotics.pdf}, doi = {10.1007/s12369-026-01376-0}, issn = {1875-4791}, year = {2026}, date = {2026-01-01}, journal = {International Journal of Social Robotics}, volume = {18}, number = {2}, pages = {31}, abstract = {We present a modular framework for enabling a mobile robot to follow a user from the front inside unknown, dynamic and relatively obstacle-laden environments. This behaviour is developed in the context of robotic assistance and rehabilitation for people with mobility impairments. The system incorporates shared-control coupled to an efficient local planner with an intention-reading algorithm recognizing the user intent in undecidable path branches. The components and interconnections are discussed in detail. Field trials with real users are presented, showing that the assistive functionality of the framework encourages users to walk closer to their natural pattern, as compared to an approach with no intelligent features. Preliminary observations suggest that the assistive mode may reduce the cognitive effort required from users. Furthermore, the success rate of the system in identifying user intent is demonstrated to be very high. It is also shown that in certain situations the user-robot pair exhibits complex interaction dynamics, in which their roles are fluid and interchangeable.}, keywords = {}, pubstate = {published}, tppubtype = {article} } We present a modular framework for enabling a mobile robot to follow a user from the front inside unknown, dynamic and relatively obstacle-laden environments. This behaviour is developed in the context of robotic assistance and rehabilitation for people with mobility impairments. The system incorporates shared-control coupled to an efficient local planner with an intention-reading algorithm recognizing the user intent in undecidable path branches. The components and interconnections are discussed in detail. Field trials with real users are presented, showing that the assistive functionality of the framework encourages users to walk closer to their natural pattern, as compared to an approach with no intelligent features. Preliminary observations suggest that the assistive mode may reduce the cognitive effort required from users. Furthermore, the success rate of the system in identifying user intent is demonstrated to be very high. It is also shown that in certain situations the user-robot pair exhibits complex interaction dynamics, in which their roles are fluid and interchangeable. |
2025 |
P. P. Drakopoulos, G. Moustris, C. Tzafestas, P. Maragos Indoor Turn-By-Turn Navigation Assistance for Robotic Rollators Conference Proc. 18th ACM Int'l Conf. on PErvasive Technologies Related to Assistive Environments (PETRA 2025), Corfu, Greece, 2025. @conference{Drakopoulos2025, title = {Indoor Turn-By-Turn Navigation Assistance for Robotic Rollators}, author = {P. P. Drakopoulos and G. Moustris and C. Tzafestas and P. Maragos}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/2025_DrakopoulosMoustris_IndoorTurn-By-TurnNavigationAssistance-for-RoboticRollators_PETRA.pdf}, year = {2025}, date = {2025-06-25}, booktitle = {Proc. 18th ACM Int'l Conf. on PErvasive Technologies Related to Assistive Environments (PETRA 2025)}, address = {Corfu, Greece}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
N. Kardaris, P. Mermigkas, G. Moustris, C. Tzafestas, P. Maragos Automated Thermal Fault Detection in Ultra-High Voltage Substation Equipment Conference Proc. IFAC Workshop on Smart Energy Systems for Efficient and Sustainable Smart Grids and Smart Cities (SENSYS 2025), Bari, Italy, 2025. @conference{Kardaris2025, title = {Automated Thermal Fault Detection in Ultra-High Voltage Substation Equipment}, author = {N. Kardaris and P. Mermigkas and G. Moustris and C. Tzafestas and P. Maragos}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/2025_Kardaris_Automated-Thermal-Fault-Detection-in-UHVS_SENSYS.pdf}, year = {2025}, date = {2025-06-18}, booktitle = {Proc. IFAC Workshop on Smart Energy Systems for Efficient and Sustainable Smart Grids and Smart Cities (SENSYS 2025)}, address = {Bari, Italy}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
P. Oikonomou, G. Retsinas, P. Maragos, C. S. Tzafestas Proactive tactile exploration for object-agnostic shape reconstruction from minimal visual priors Conference Proc. 2025 IEEE International Conference on Robotics and Automation (ICRA 2025), Atlanta, USA, 2025. @conference{Oikonomou2025, title = {Proactive tactile exploration for object-agnostic shape reconstruction from minimal visual priors}, author = {P. Oikonomou and G. Retsinas and P. Maragos and C. S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/2025_Oikonomou_Proactive_tactile_exploration_for_object_agnostic_shape_reconstruction_ICRA.pdf}, year = {2025}, date = {2025-05-01}, booktitle = {Proc. 2025 IEEE International Conference on Robotics and Automation (ICRA 2025)}, address = {Atlanta, USA}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2024 |
N. Pagliarani, C. Tzafestas, E. Papadopoulos, P. Maragos, A. Mastrogeorgiou, A. Porichis, H. Grogan, R. Ehrhardt, M. Cianchetti SoftGrip: Towards a Soft Robotic Platform for Automatized Mushroom Harvesting Conference European Robotics Forum 2024, Springer Nature, 2024. @conference{N2024, title = {SoftGrip: Towards a Soft Robotic Platform for Automatized Mushroom Harvesting}, author = {N. Pagliarani and C. Tzafestas and E. Papadopoulos and P. Maragos and A. Mastrogeorgiou and A. Porichis and H. Grogan and R. Ehrhardt and M. Cianchetti}, editor = {C Secchi and L Marconi}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/2024_SoftGrip_ERF.pdf}, doi = {https://doi.org/10.1007/978-3-031-76424-0_9}, year = {2024}, date = {2024-01-01}, booktitle = {European Robotics Forum 2024}, pages = {48-52}, publisher = {Springer Nature}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2021 |
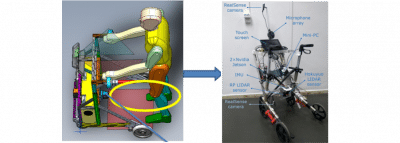
George Moustris, Nikolaos Kardaris, Antigoni Tsiami, Georgia Chalvatzaki, Petros Koutras, Athanasios Dometios, Paris Oikonomou, Costas Tzafestas, Petros Maragos, Eleni Efthimiou, Xanthi Papageorgiou, Stavroula-Evita Fotinea, Yiannis Koumpouros, Anna Vacalopoulou, Effie Papageorgiou, Alexandra Karavasili, Foteini Koureta, Dimitris Dimou, Alexandros Nikolakakis, Konstantinos Karaiskos, Panagiotis Mavridis The i-Walk Lightweight Assistive Rollator: First Evaluation Study Journal Article Frontiers in Robotics and AI, 8 , pp. 272, 2021, ISSN: 2296-9144. Abstract | BibTeX | Links: [PDF] @article{10.3389/frobt.2021.677542, title = {The i-Walk Lightweight Assistive Rollator: First Evaluation Study}, author = {George Moustris and Nikolaos Kardaris and Antigoni Tsiami and Georgia Chalvatzaki and Petros Koutras and Athanasios Dometios and Paris Oikonomou and Costas Tzafestas and Petros Maragos and Eleni Efthimiou and Xanthi Papageorgiou and Stavroula-Evita Fotinea and Yiannis Koumpouros and Anna Vacalopoulou and Effie Papageorgiou and Alexandra Karavasili and Foteini Koureta and Dimitris Dimou and Alexandros Nikolakakis and Konstantinos Karaiskos and Panagiotis Mavridis}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/frobt-08-677542.pdf}, doi = {10.3389/frobt.2021.677542}, issn = {2296-9144}, year = {2021}, date = {2021-12-30}, journal = {Frontiers in Robotics and AI}, volume = {8}, pages = {272}, abstract = {Robots can play a significant role as assistive devices for people with movement impairment and mild cognitive deficit. In this paper we present an overview of the lightweight i-Walk intelligent robotic rollator, which offers cognitive and mobility assistance to the elderly and to people with light to moderate mobility impairment. The utility, usability, safety and technical performance of the device is investigated through a clinical study, which took place at a rehabilitation center in Greece involving real patients with mild to moderate cognitive and mobility impairment. This first evaluation study comprised a set of scenarios in a number of pre-defined use cases, including physical rehabilitation exercises, as well as mobility and ambulation involved in typical daily living activities of the patients. The design and implementation of this study is discussed in detail, along with the obtained results, which include both an objective and a subjective evaluation of the system operation, based on a set of technical performance measures and a validated questionnaire for the analysis of qualitative data, respectively. The study shows that the technical modules performed satisfactory under real conditions, and that the users generally hold very positive views of the platform, considering it safe and reliable.}, keywords = {}, pubstate = {published}, tppubtype = {article} } Robots can play a significant role as assistive devices for people with movement impairment and mild cognitive deficit. In this paper we present an overview of the lightweight i-Walk intelligent robotic rollator, which offers cognitive and mobility assistance to the elderly and to people with light to moderate mobility impairment. The utility, usability, safety and technical performance of the device is investigated through a clinical study, which took place at a rehabilitation center in Greece involving real patients with mild to moderate cognitive and mobility impairment. This first evaluation study comprised a set of scenarios in a number of pre-defined use cases, including physical rehabilitation exercises, as well as mobility and ambulation involved in typical daily living activities of the patients. The design and implementation of this study is discussed in detail, along with the obtained results, which include both an objective and a subjective evaluation of the system operation, based on a set of technical performance measures and a validated questionnaire for the analysis of qualitative data, respectively. The study shows that the technical modules performed satisfactory under real conditions, and that the users generally hold very positive views of the platform, considering it safe and reliable. |
Danai Efstathiou, Georgia Chalvatzaki, Athanasios Dometios, Dionisios Spiliopoulos, Costas S Tzafestas Deep Leg Tracking by Detection and Gait Analysis in 2D Range Data for Intelligent Robotic Assistants Conference 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021. BibTeX | Links: [Slides] [PDF] @conference{efstathiou2021deep, title = {Deep Leg Tracking by Detection and Gait Analysis in 2D Range Data for Intelligent Robotic Assistants}, author = {Danai Efstathiou and Georgia Chalvatzaki and Athanasios Dometios and Dionisios Spiliopoulos and Costas S Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Efstathiou_DeepLegTracking_IROS2021_slides.pdf http://robotics.ntua.gr/wp-content/uploads/sites/2/Efstathiou_DeepLegTracking_IROS2021.pdf}, year = {2021}, date = {2021-01-01}, booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages = {2657-2662}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
Xanthi S Papageorgiou, Athanasios C Dometios, Costas S Tzafestas Towards a User Adaptive Assistive Robot: Learning from Demonstration Using Navigation Functions Conference 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021. @conference{papageorgiou2021towards, title = {Towards a User Adaptive Assistive Robot: Learning from Demonstration Using Navigation Functions}, author = {Xanthi S Papageorgiou and Athanasios C Dometios and Costas S Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Papageorgiou_NFLearning_IROS2021.pdf}, year = {2021}, date = {2021-01-01}, booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages = {965-970}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2020 |
Christian Werner, Athanasios C Dometios, Costas S Tzafestas, Petros Maragos, Jürgen M Bauer, Klaus Hauer Evaluating the task effectiveness and user satisfaction with different operation modes of an assistive bathing robot in older adults Journal Article Assistive Technology, 0 , 2020, (PMID: 32286163). BibTeX | Links: [Webpage] [PDF] @article{doi:10.1080/10400435.2020.1755744, title = {Evaluating the task effectiveness and user satisfaction with different operation modes of an assistive bathing robot in older adults}, author = {Christian Werner and Athanasios C Dometios and Costas S Tzafestas and Petros Maragos and Jürgen M Bauer and Klaus Hauer}, url = {https://doi.org/10.1080/10400435.2020.1755744 http://robotics.ntua.gr/wp-content/uploads/sites/2/Werner2020_EvaluatingTheTaskEffectivenessAndUserSatisfaction-AssistBathRobot_AssistTechnology.pdf}, doi = {10.1080/10400435.2020.1755744}, year = {2020}, date = {2020-07-08}, journal = {Assistive Technology}, volume = {0}, publisher = {Taylor & Francis}, note = {PMID: 32286163}, keywords = {}, pubstate = {published}, tppubtype = {article} } |
A Zlatintsi, A C Dometios, N Kardaris, I Rodomagoulakis, P Koutras, X Papageorgiou, P Maragos, C S Tzafestas, P Vartholomeos, K Hauer, C Werner, R Annicchiarico, M G Lombardi, F Adriano, T Asfour, A M Sabatini, C Laschi, M Cianchetti, A Güler, I Kokkinos, B Klein, R López I-Support: A robotic platform of an assistive bathing robot for the elderly population Journal Article Robotics and Autonomous Systems, 126 , pp. 103451, 2020, ISSN: 0921-8890. Abstract | BibTeX | Links: [Webpage] [PDF] @article{ZLATINTSI2020103451, title = {I-Support: A robotic platform of an assistive bathing robot for the elderly population}, author = {A Zlatintsi and A C Dometios and N Kardaris and I Rodomagoulakis and P Koutras and X Papageorgiou and P Maragos and C S Tzafestas and P Vartholomeos and K Hauer and C Werner and R Annicchiarico and M G Lombardi and F Adriano and T Asfour and A M Sabatini and C Laschi and M Cianchetti and A Güler and I Kokkinos and B Klein and R López}, url = {http://www.sciencedirect.com/science/article/pii/S0921889019304968 http://robotics.ntua.gr/wp-content/uploads/sites/2/ICCSetal_I-Support_RAS-2020.pdf}, doi = {https://doi.org/10.1016/j.robot.2020.103451}, issn = {0921-8890}, year = {2020}, date = {2020-04-10}, journal = {Robotics and Autonomous Systems}, volume = {126}, pages = {103451}, abstract = {In this paper we present a prototype integrated robotic system, the I-Support bathing robot, that aims at supporting new aspects of assisted daily-living activities on a real-life scenario. The paper focuses on describing and evaluating key novel technological features of the system, with the emphasis on cognitive human–robot interaction modules and their evaluation through a series of clinical validation studies. The I-Support project on its whole has envisioned the development of an innovative, modular, ICT-supported service robotic system that assists frail seniors to safely and independently complete an entire sequence of physically and cognitively demanding bathing tasks, such as properly washing their back and their lower limbs. A variety of innovative technologies have been researched and a set of advanced modules of sensing, cognition, actuation and control have been developed and seamlessly integrated to enable the system to adapt to the target population abilities. These technologies include: human activity monitoring and recognition, adaptation of a motorized chair for safe transfer of the elderly in and out the bathing cabin, a context awareness system that provides full environmental awareness, as well as a prototype soft robotic arm and a set of user-adaptive robot motion planning and control algorithms. This paper focuses in particular on the multimodal action recognition system, developed to monitor, analyze and predict user actions with a high level of accuracy and detail in real-time, which are then interpreted as robotic tasks. In the same framework, the analysis of human actions that have become available through the project’s multimodal audio–gestural dataset, has led to the successful modeling of Human–Robot Communication, achieving an effective and natural interaction between users and the assistive robotic platform. In order to evaluate the I-Support system, two multinational validation studies were conducted under realistic operating conditions in two clinical pilot sites. Some of the findings of these studies are presented and analyzed in the paper, showing good results in terms of: (i) high acceptability regarding the system usability by this particularly challenging target group, the elderly end-users, and (ii) overall task effectiveness of the system in different operating modes.}, keywords = {}, pubstate = {published}, tppubtype = {article} } In this paper we present a prototype integrated robotic system, the I-Support bathing robot, that aims at supporting new aspects of assisted daily-living activities on a real-life scenario. The paper focuses on describing and evaluating key novel technological features of the system, with the emphasis on cognitive human–robot interaction modules and their evaluation through a series of clinical validation studies. The I-Support project on its whole has envisioned the development of an innovative, modular, ICT-supported service robotic system that assists frail seniors to safely and independently complete an entire sequence of physically and cognitively demanding bathing tasks, such as properly washing their back and their lower limbs. A variety of innovative technologies have been researched and a set of advanced modules of sensing, cognition, actuation and control have been developed and seamlessly integrated to enable the system to adapt to the target population abilities. These technologies include: human activity monitoring and recognition, adaptation of a motorized chair for safe transfer of the elderly in and out the bathing cabin, a context awareness system that provides full environmental awareness, as well as a prototype soft robotic arm and a set of user-adaptive robot motion planning and control algorithms. This paper focuses in particular on the multimodal action recognition system, developed to monitor, analyze and predict user actions with a high level of accuracy and detail in real-time, which are then interpreted as robotic tasks. In the same framework, the analysis of human actions that have become available through the project’s multimodal audio–gestural dataset, has led to the successful modeling of Human–Robot Communication, achieving an effective and natural interaction between users and the assistive robotic platform. In order to evaluate the I-Support system, two multinational validation studies were conducted under realistic operating conditions in two clinical pilot sites. Some of the findings of these studies are presented and analyzed in the paper, showing good results in terms of: (i) high acceptability regarding the system usability by this particularly challenging target group, the elderly end-users, and (ii) overall task effectiveness of the system in different operating modes. |
Christian Werner, Nikos Kardaris, Petros Koutras, Athanasia Zlatintsi, Petros Maragos, Jürgen M Bauer, Klaus Hauer Improving gesture-based interaction between an assistive bathing robot and older adults via user training on the gestural commands Journal Article Archives of Gerontology and Geriatrics, 87 , pp. 103996, 2020, ISSN: 0167-4943. Abstract | BibTeX | Links: [Webpage] [PDF] @article{WERNER2020103996, title = {Improving gesture-based interaction between an assistive bathing robot and older adults via user training on the gestural commands}, author = {Christian Werner and Nikos Kardaris and Petros Koutras and Athanasia Zlatintsi and Petros Maragos and Jürgen M Bauer and Klaus Hauer}, url = {http://www.sciencedirect.com/science/article/pii/S0167494319302390 http://robotics.ntua.gr/wp-content/uploads/sites/2/Improving-gesture-based-interaction-between-an-assistive-bathing-robot-and-older-adults-via-user-training-on-the-gestural-commands.pdf}, doi = {https://doi.org/10.1016/j.archger.2019.103996}, issn = {0167-4943}, year = {2020}, date = {2020-03-01}, journal = {Archives of Gerontology and Geriatrics}, volume = {87}, pages = {103996}, abstract = {Background Gesture-based human-robot interaction (HRI) depends on the technical performance of the robot-integrated gesture recognition system (GRS) and on the gestural performance of the robot user, which has been shown to be rather low in older adults. Training of gestural commands (GCs) might improve the quality of older users’ input for gesture-based HRI, which in turn may lead to an overall improved HRI. Objective To evaluate the effects of a user training on gesture-based HRI between an assistive bathing robot and potential elderly robot users. Methods Twenty-five older adults with bathing disability participated in this quasi-experimental, single-group, pre-/post-test study and underwent a specific user training (10−15 min) on GCs for HRI with the assistive bathing robot. Outcomes measured before and after training included participants’ gestural performance assessed by a scoring method of an established test of gesture production (TULIA) and sensor-based gestural performance (SGP) scores derived from the GRS-recorded data, and robot’s command recognition rate (CRR). Results Gestural performance (TULIA = +57.1 ± 56.2 %, SGP scores = +41.1 ± 74.4 %) and CRR (+31.9 ± 51.2 %) significantly improved over training (p < .001). Improvements in gestural performance and CRR were highly associated with each other (r = 0.80–0.81, p < .001). Participants with lower initial gestural performance and higher gerontechnology anxiety benefited most from the training. Conclusions Our study highlights that training in gesture-based HRI with an assistive bathing robot is highly beneficial for the quality of older users’ GCs, leading to higher CRRs of the robot-integrated GRS, and thus to an overall improved HRI.}, keywords = {}, pubstate = {published}, tppubtype = {article} } Background Gesture-based human-robot interaction (HRI) depends on the technical performance of the robot-integrated gesture recognition system (GRS) and on the gestural performance of the robot user, which has been shown to be rather low in older adults. Training of gestural commands (GCs) might improve the quality of older users’ input for gesture-based HRI, which in turn may lead to an overall improved HRI. Objective To evaluate the effects of a user training on gesture-based HRI between an assistive bathing robot and potential elderly robot users. Methods Twenty-five older adults with bathing disability participated in this quasi-experimental, single-group, pre-/post-test study and underwent a specific user training (10−15 min) on GCs for HRI with the assistive bathing robot. Outcomes measured before and after training included participants’ gestural performance assessed by a scoring method of an established test of gesture production (TULIA) and sensor-based gestural performance (SGP) scores derived from the GRS-recorded data, and robot’s command recognition rate (CRR). Results Gestural performance (TULIA = +57.1 ± 56.2 %, SGP scores = +41.1 ± 74.4 %) and CRR (+31.9 ± 51.2 %) significantly improved over training (p < .001). Improvements in gestural performance and CRR were highly associated with each other (r = 0.80–0.81, p < .001). Participants with lower initial gestural performance and higher gerontechnology anxiety benefited most from the training. Conclusions Our study highlights that training in gesture-based HRI with an assistive bathing robot is highly beneficial for the quality of older users’ GCs, leading to higher CRRs of the robot-integrated GRS, and thus to an overall improved HRI. |
Georgia Chalvatzaki, Petros Koutras, Antigoni Tsiami, Costas S. Tzafestas, Petros Maragos i-Walk Intelligent Assessment System: Activity, Mobility, Intention, Communication Conference Proc. 16th European Computer Vision Conference Workshops (ECCVW) – 8th Int’l Workshop on Assistive Computer Vision and Robotics (ACVR-2020), Online, 2020. @conference{Chalvatzaki2020, title = {i-Walk Intelligent Assessment System: Activity, Mobility, Intention, Communication}, author = {Georgia Chalvatzaki and Petros Koutras and Antigoni Tsiami and Costas S. Tzafestas and Petros Maragos}, url = {https://robotics.ntua.gr/wp-content/uploads/2020_ChalvatzakiKoutrasTsiami+_iWalkIntelligentAssessmentSystem_ECCVW-ACVR.pdf}, year = {2020}, date = {2020-08-01}, booktitle = {Proc. 16th European Computer Vision Conference Workshops (ECCVW) – 8th Int’l Workshop on Assistive Computer Vision and Robotics (ACVR-2020)}, address = {Online}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2019 |
Georgia Chalvatzaki, Xanthi S Papageorgiou, Petros Maragos, Costas S Tzafestas Learn to adapt to human walking: A Model-based Reinforcement Learning Approach for a Robotic Assistant Rollator Journal Article IEEE Robotics and Automation Letters (with IROS option), 4 (4), pp. 3774–3781, 2019. @article{chalvatzaki2019learn, title = {Learn to adapt to human walking: A Model-based Reinforcement Learning Approach for a Robotic Assistant Rollator}, author = {Georgia Chalvatzaki and Xanthi S Papageorgiou and Petros Maragos and Costas S Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/19-0390_03_MS.pdf}, year = {2019}, date = {2019-12-31}, journal = {IEEE Robotics and Automation Letters (with IROS option)}, volume = {4}, number = {4}, pages = {3774--3781}, publisher = {IEEE}, keywords = {}, pubstate = {published}, tppubtype = {article} } |
Georgia Chalvatzaki, Xanthi S. Papageorgiou, Petros Maragos, Costas S. Tzafestas Comparing the Impact of Robotic Rollator Control Schemes on Elderly Gait using on-line LRF-based Gait Analysis Conference Proc. Workshop on Mobile Robot Assistants for the Elderly (MoRobAE) in 2019 IEEE Int’l Conference on Robotics and Automation (ICRA), Montreal, Canada, 2019. @conference{Chalvatzaki2019b, title = {Comparing the Impact of Robotic Rollator Control Schemes on Elderly Gait using on-line LRF-based Gait Analysis}, author = {Georgia Chalvatzaki and Xanthi S. Papageorgiou and Petros Maragos and Costas S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/ChalvatzakiEtAl_Comparing-the-Impact-of-Robotic-Rollator_MoRobAE-ICRA2019.pdf}, year = {2019}, date = {2019-12-01}, booktitle = { Proc. Workshop on Mobile Robot Assistants for the Elderly (MoRobAE) in 2019 IEEE Int’l Conference on Robotics and Automation (ICRA)}, address = {Montreal, Canada}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
Jack Hadfield, Georgia Chalvatzaki, Petros Koutras, Mehdi Khamassi, Costas S Tzafestas, Petros Maragos A Deep Learning Approach for Multi-View Engagement Estimation of Children in a Child-Robot Joint Attention Task Conference 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019), Macau, China, 2019. @conference{hadfield:hal-02324118, title = {A Deep Learning Approach for Multi-View Engagement Estimation of Children in a Child-Robot Joint Attention Task}, author = {Jack Hadfield and Georgia Chalvatzaki and Petros Koutras and Mehdi Khamassi and Costas S Tzafestas and Petros Maragos}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/A_Deep_Learning_Approach_for_Multi-View_Engagement_Estimation_of_Children_in_a_Child-Robot_Joint_Attention_Task-1.pdf}, year = {2019}, date = {2019-11-04}, booktitle = {2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019)}, address = {Macau, China}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
Georgia Chalvatzaki, Petros Koutras, Jack Hadfield, Xanthi S. Papageorgiou, Costas S. Tzafestas, Petros Maragos On-line Human Gait Stability Prediction using LSTMs for the fusion of Deep-based Pose Estimation and LRF-based Augmented Gait State Estimation in an Intelligent Robotic Rollator Conference IEEE International Conference on Robotics & Automation (ICRA), Montreal, Canada, 2019. @conference{Chalvatzaki2019d, title = {On-line Human Gait Stability Prediction using LSTMs for the fusion of Deep-based Pose Estimation and LRF-based Augmented Gait State Estimation in an Intelligent Robotic Rollator}, author = {Georgia Chalvatzaki and Petros Koutras and Jack Hadfield and Xanthi S. Papageorgiou and Costas S. Tzafestas and Petros Maragos}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/On-line_Human_Gait_Stability_Prediction_using_LSTM.pdf}, year = {2019}, date = {2019-09-19}, booktitle = {IEEE International Conference on Robotics & Automation (ICRA)}, address = {Montreal, Canada}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
G. Chalvatzaki, P. Koutras, J. Hadfield, X. S. Papageorgiou, C. S. Tzafestas, P. Maragos LSTM-based Network for Human Gait Stability Prediction in an Intelligent Robotic Rollator Conference Proc. 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, Canada, 2019. @conference{Chalvatzaki2019, title = {LSTM-based Network for Human Gait Stability Prediction in an Intelligent Robotic Rollator}, author = {G. Chalvatzaki and P. Koutras and J. Hadfield and X. S. Papageorgiou and C. S. Tzafestas and P. Maragos}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/ChalvatzakiEtAl_LSTMGaitStab_ICRA2019.pdf}, year = {2019}, date = {2019-05-01}, booktitle = {Proc. 2019 IEEE International Conference on Robotics and Automation (ICRA)}, address = {Montreal, Canada}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
Xanthi S Papageorgiou, Georgia Chalvatzaki, Eleni Efthimiou, Stavroula-Evita Fotinea, Alexandra Karavasili, Costas S Tzafestas, Petros Maragos, Anna Vacalopoulou, Theodore Goulas User Centered HRI Design for an Intelligent Robotic Rollator Conference Proc. Workshop on Mobile Robot Assistants for the Elderly (MoRobAE) in 2019 IEEE Int’l Conference on Robotics and Automation (ICRA), Montreal, Canada, 2019. @conference{papageorgiouuser, title = {User Centered HRI Design for an Intelligent Robotic Rollator}, author = {Xanthi S Papageorgiou and Georgia Chalvatzaki and Eleni Efthimiou and Stavroula-Evita Fotinea and Alexandra Karavasili and Costas S Tzafestas and Petros Maragos and Anna Vacalopoulou and Theodore Goulas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/PapageorgiouEtAl_UserCenteredHRI_MoRobAE-ICRA2019.pdf}, year = {2019}, date = {2019-05-01}, booktitle = {Proc. Workshop on Mobile Robot Assistants for the Elderly (MoRobAE) in 2019 IEEE Int’l Conference on Robotics and Automation (ICRA)}, address = {Montreal, Canada}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2018 |
A C Dometios, Y Zhou, X S Papageorgiou, C S Tzafestas, T Asfour Vision-Based Online Adaptation of Motion Primitives to Dynamic Surfaces: Application to an Interactive Robotic Wiping Task Journal Article IEEE Robotics and Automation Letters, 3 (3), pp. 1410-1417, 2018. Abstract | BibTeX | Links: [PDF] @article{DZPTA18, title = {Vision-Based Online Adaptation of Motion Primitives to Dynamic Surfaces: Application to an Interactive Robotic Wiping Task}, author = {A C Dometios and Y Zhou and X S Papageorgiou and C S Tzafestas and T Asfour}, url = {http://robotics.ntua.gr/wp-content/publications/Dometios18_Vision-Based_Online_Adaptation_Motion_Primitives.pdf}, doi = {10.1109/LRA.2018.2800031}, year = {2018}, date = {2018-07-01}, journal = {IEEE Robotics and Automation Letters}, volume = {3}, number = {3}, pages = {1410-1417}, abstract = {Elderly or disabled people usually need augmented nursing attention both in home and clinical environments, especially to perform bathing activities. The development of an assistive robotic bath system, which constitutes a central motivation of this work, would increase the independence and safety of this procedure, ameliorating in this way the everyday life for this group of people. In general terms, the main goal of this work is to enable natural, physical human-robot interaction, involving human-friendly and user-adaptive on-line robot motion planning and interaction control. For this purpose, we employ imitation learning using a leader-follower framework called Coordinate Change Dynamic Movement Primitives (CC-DMP), in order to incorporate the expertise of professional carers for bathing sequences. In this letter, we propose a vision-based washing system, combining CC-DMP framework with a perception-based controller, to adapt the motion of robot’s end effector on moving and deformable surfaces, such as a human body part. The controller guarantees globally uniformly asymptotic convergence to the leader movement primitive while ensuring avoidance of restricted areas, such as sensitive skin body areas. We experimentally tested our approach on a setup including the humanoid robot ARMAR-III and a Kinect v2 camera. The robot executes motions learned from the publicly available KIT whole-body human motion database, achieving good tracking performance in challenging interactive task scenarios.}, keywords = {}, pubstate = {published}, tppubtype = {article} } Elderly or disabled people usually need augmented nursing attention both in home and clinical environments, especially to perform bathing activities. The development of an assistive robotic bath system, which constitutes a central motivation of this work, would increase the independence and safety of this procedure, ameliorating in this way the everyday life for this group of people. In general terms, the main goal of this work is to enable natural, physical human-robot interaction, involving human-friendly and user-adaptive on-line robot motion planning and interaction control. For this purpose, we employ imitation learning using a leader-follower framework called Coordinate Change Dynamic Movement Primitives (CC-DMP), in order to incorporate the expertise of professional carers for bathing sequences. In this letter, we propose a vision-based washing system, combining CC-DMP framework with a perception-based controller, to adapt the motion of robot’s end effector on moving and deformable surfaces, such as a human body part. The controller guarantees globally uniformly asymptotic convergence to the leader movement primitive while ensuring avoidance of restricted areas, such as sensitive skin body areas. We experimentally tested our approach on a setup including the humanoid robot ARMAR-III and a Kinect v2 camera. The robot executes motions learned from the publicly available KIT whole-body human motion database, achieving good tracking performance in challenging interactive task scenarios. |
G Chalvatzaki, X S Papageorgiou, C S Tzafestas, P Maragos Augmented Human State Estimation Using Interacting Multiple Model Particle Filters With Probabilistic Data Association Journal Article IEEE Robotics and Automation Letters, 3 (3), pp. 1872-1879, 2018, ISSN: 2377-3766. @article{8276229, title = {Augmented Human State Estimation Using Interacting Multiple Model Particle Filters With Probabilistic Data Association}, author = {G Chalvatzaki and X S Papageorgiou and C S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/2018_ChalvatzakiEtAl_HumanStateEstim-IMM-ParticleFilters-PDA_ieeeRAL.pdf}, doi = {10.1109/LRA.2018.2800084}, issn = {2377-3766}, year = {2018}, date = {2018-07-01}, journal = {IEEE Robotics and Automation Letters}, volume = {3}, number = {3}, pages = {1872-1879}, keywords = {}, pubstate = {published}, tppubtype = {article} } |
Mehdi Khamassi, George Velentzas, Theodore Tsitsimis, Costas Tzafestas Robot fast adaptation to changes in human engagement during simulated dynamic social interaction with active exploration in parameterized reinforcement learning Journal Article IEEE Transactions on Cognitive and Developmental Systems, 10 , pp. 881 - 893, 2018. Abstract | BibTeX | Links: [PDF] @article{BFB99, title = {Robot fast adaptation to changes in human engagement during simulated dynamic social interaction with active exploration in parameterized reinforcement learning}, author = {Mehdi Khamassi and George Velentzas and Theodore Tsitsimis and Costas Tzafestas}, url = {http://robotics.ntua.gr/wp-content/publications/Khamassi_TCDS2018.pdf}, doi = {10.1109/TCDS.2018.2843122}, year = {2018}, date = {2018-01-01}, journal = { IEEE Transactions on Cognitive and Developmental Systems}, volume = {10}, pages = {881 - 893}, publisher = {IEEE}, abstract = {Dynamic uncontrolled human-robot interactions (HRI) require robots to be able to adapt to changes in the human’s behavior and intentions. Among relevant signals, non-verbal cues such as the human’s gaze can provide the robot with important information about the human’s current engagement in the task, and whether the robot should continue its current behavior or not. However, robot reinforcement learning (RL) abilities to adapt to these non-verbal cues are still underdeveloped. Here we propose an active exploration algorithm for RL during HRI where the reward function is the weighted sum of the human’s current engagement and variations of this engagement. We use a parameterized action space where a meta-learning algorithm is applied to simultaneously tune the exploration in discrete action space (e.g. moving an object) and in the space of continuous characteristics of movement (e.g. velocity, direction, strength, expressivity). We first show that this algorithm reaches state-of-the-art performance in the non-stationary multi-armed bandit paradigm. We then apply it to a simulated HRI task, and show that it outperforms continuous parameterized RL with either passive or active exploration based on different existing methods. We finally test the performance in a more realistic test of the same HRI task, where a practical approach is followed to estimate human engagement through visual cues of the head pose. The algorithm can detect and adapt to perturbations in human engagement with different durations. Altogether, these results suggest a novel efficient and robust framework for robot learning during dynamic HRI scenarios.}, keywords = {}, pubstate = {published}, tppubtype = {article} } Dynamic uncontrolled human-robot interactions (HRI) require robots to be able to adapt to changes in the human’s behavior and intentions. Among relevant signals, non-verbal cues such as the human’s gaze can provide the robot with important information about the human’s current engagement in the task, and whether the robot should continue its current behavior or not. However, robot reinforcement learning (RL) abilities to adapt to these non-verbal cues are still underdeveloped. Here we propose an active exploration algorithm for RL during HRI where the reward function is the weighted sum of the human’s current engagement and variations of this engagement. We use a parameterized action space where a meta-learning algorithm is applied to simultaneously tune the exploration in discrete action space (e.g. moving an object) and in the space of continuous characteristics of movement (e.g. velocity, direction, strength, expressivity). We first show that this algorithm reaches state-of-the-art performance in the non-stationary multi-armed bandit paradigm. We then apply it to a simulated HRI task, and show that it outperforms continuous parameterized RL with either passive or active exploration based on different existing methods. We finally test the performance in a more realistic test of the same HRI task, where a practical approach is followed to estimate human engagement through visual cues of the head pose. The algorithm can detect and adapt to perturbations in human engagement with different durations. Altogether, these results suggest a novel efficient and robust framework for robot learning during dynamic HRI scenarios. |
X S Papageorgiou, G Chalvatzaki, A Dometios, C S Tzafestas Human-Centered Service Robotic Systems for Assisted Living Conference Proceedings of the 27th International Conference on Robotics in Alpe-Adria Danube Region (RAAD 2018), 2018. Abstract | BibTeX | Links: [PDF] @conference{RAAD2018, title = {Human-Centered Service Robotic Systems for Assisted Living}, author = {X S Papageorgiou and G Chalvatzaki and A Dometios and C S Tzafestas}, url = {http://robotics.ntua.gr/wp-content/publications/RAAD2018.pdf}, year = {2018}, date = {2018-06-01}, booktitle = {Proceedings of the 27th International Conference on Robotics in Alpe-Adria Danube Region (RAAD 2018)}, abstract = {Mobility impairment is a common problem for the elderly population which relates to difficulties in performing Activities of Daily Living (ADLs) and consequently leads to restrictions and the degradation of the living standards of the elders. When designing a user-friendly assistive device for mobility constrained people, the variable spectrum of disabilities is a factor that should affect the design process, since people with different impairments have different needs to be covered by the device, thus an adaptive behavior of those systems is necessary. Also, the performance of bathing activities includes several challenges for the elderly people, since such tasks require body flexibility. In this paper, we present current frameworks and solutions for intelligent robotic systems for assistive living involving human robot interaction in a natural interface. Our aim is to build such systems, in order to increase the independence and safety of these procedures. To achieve human - robot interaction in a natural way, we have to adapt the expertise of carers regarding bathing motions and walking assistance. The main goal of this work is to present recent research results towards the development of two real-life use cases incorporating intelligent robotic systems, aiming to support mobility and bathing activities for the elderly in order to provide context-aware and user-adaptive assistance.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Mobility impairment is a common problem for the elderly population which relates to difficulties in performing Activities of Daily Living (ADLs) and consequently leads to restrictions and the degradation of the living standards of the elders. When designing a user-friendly assistive device for mobility constrained people, the variable spectrum of disabilities is a factor that should affect the design process, since people with different impairments have different needs to be covered by the device, thus an adaptive behavior of those systems is necessary. Also, the performance of bathing activities includes several challenges for the elderly people, since such tasks require body flexibility. In this paper, we present current frameworks and solutions for intelligent robotic systems for assistive living involving human robot interaction in a natural interface. Our aim is to build such systems, in order to increase the independence and safety of these procedures. To achieve human - robot interaction in a natural way, we have to adapt the expertise of carers regarding bathing motions and walking assistance. The main goal of this work is to present recent research results towards the development of two real-life use cases incorporating intelligent robotic systems, aiming to support mobility and bathing activities for the elderly in order to provide context-aware and user-adaptive assistance. |
A Zlatintsi, I Rodomagoulakis, P Koutras, A ~C Dometios, V Pitsikalis, C ~S Tzafestas, P Maragos Multimodal Signal Processing and Learning Aspects of Human-Robot Interaction for an Assistive Bathing Robot Conference Proc. IEEE Int'l Conf. Acous., Speech, and Signal Processing, Calgary, Canada, 2018. Abstract | BibTeX | Links: [PDF] @conference{ZRK+18, title = {Multimodal Signal Processing and Learning Aspects of Human-Robot Interaction for an Assistive Bathing Robot}, author = {A Zlatintsi and I Rodomagoulakis and P Koutras and A ~C Dometios and V Pitsikalis and C ~S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/Zlatintsi+_I-SUPPORT_ICASSP18.pdf}, year = {2018}, date = {2018-04-01}, booktitle = {Proc. IEEE Int'l Conf. Acous., Speech, and Signal Processing}, address = {Calgary, Canada}, abstract = {We explore new aspects of assistive living on smart human-robot interaction (HRI) that involve automatic recognition and online validation of speech and gestures in a natural interface, providing social features for HRI. We introduce a whole framework and resources of a real-life scenario for elderly subjects supported by an assistive bathing robot, addressing health and hygiene care issues. We contribute a new dataset and a suite of tools used for data acquisition and a state-of-the-art pipeline for multimodal learning within the framework of the I-Support bathing robot, with emphasis on audio and RGB-D visual streams. We consider privacy issues by evaluating the depth visual stream along with the RGB, using Kinect sensors. The audio-gestural recognition task on this new dataset yields up to 84.5%, while the online validation of the I-Support system on elderly users accomplishes up to 84% when the two modalities are fused together. The results are promising enough to support further research in the area of multimodal recognition for assistive social HRI, considering the difficulties of the specific task.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } We explore new aspects of assistive living on smart human-robot interaction (HRI) that involve automatic recognition and online validation of speech and gestures in a natural interface, providing social features for HRI. We introduce a whole framework and resources of a real-life scenario for elderly subjects supported by an assistive bathing robot, addressing health and hygiene care issues. We contribute a new dataset and a suite of tools used for data acquisition and a state-of-the-art pipeline for multimodal learning within the framework of the I-Support bathing robot, with emphasis on audio and RGB-D visual streams. We consider privacy issues by evaluating the depth visual stream along with the RGB, using Kinect sensors. The audio-gestural recognition task on this new dataset yields up to 84.5%, while the online validation of the I-Support system on elderly users accomplishes up to 84% when the two modalities are fused together. The results are promising enough to support further research in the area of multimodal recognition for assistive social HRI, considering the difficulties of the specific task. |
Jack Hadfield, Petros Koutras, Niki Efthymiou, Gerasimos Potamianos, Costas S Tzafestas, Petros Maragos Object assembly guidance in child-robot interaction using RGB-D based 3d tracking Conference 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE 2018. @conference{hadfield2018object, title = {Object assembly guidance in child-robot interaction using RGB-D based 3d tracking}, author = {Jack Hadfield and Petros Koutras and Niki Efthymiou and Gerasimos Potamianos and Costas S Tzafestas and Petros Maragos}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/2018_HadfieldEtAl_ObjectAssemblyGuidance-ChildRobotInteraction_IROS.pdf}, year = {2018}, date = {2018-01-01}, booktitle = {2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages = {347--354}, organization = {IEEE}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2017 |
G Chalvatzaki, X S Papageorgiou, C S Tzafestas, P Maragos HMM-based Pathological Gait Analyzer for a User-Adaptive Intelligent Robotic Walker Conference Proc. 25th European Conf.(EUSIPCO-17) Workshop: "MultiLearn 2017 - Multimodal processing, modeling and learning for human-computer/robot interaction applications", Kos, Greece, 2017. Abstract | BibTeX | Links: [PDF] @conference{CPTM_WML17, title = {HMM-based Pathological Gait Analyzer for a User-Adaptive Intelligent Robotic Walker}, author = {G Chalvatzaki and X S Papageorgiou and C S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/CPTM_WML17.pdf}, year = {2017}, date = {2017-09-01}, booktitle = {Proc. 25th European Conf.(EUSIPCO-17) Workshop: "MultiLearn 2017 - Multimodal processing, modeling and learning for human-computer/robot interaction applications"}, address = {Kos, Greece}, abstract = {During the past decade, robotic technology has evolved considerably towards the development of cognitive robotic systems that enable close interaction with humans. Application fields of such novel robotic technologies are now wide spreading covering a variety of human assistance function- alities, aiming in particular at supporting the needs of human beings experiencing various forms of mobility or cognitive impairments. Mobility impairments are prevalent in the elderly population and constitute one of the main causes related to difficulties in performing Activities of Daily Living (ADLs) and consequent reduction of quality of life. This paper re- ports current research work related to the development of a pathological gait analyzer for intelligent robotic rollator aiming to be an input to a user-adaptive and context-aware robot control architecture. Specifically, we present a novel method for human leg tracking using Particle Filters and Probablistic Data Association from a laser scanner, constituting a non- wearable and non-intrusive approach. The tracked positions and velocities of the user’s legs are the observables of an HMM, which provides the gait phases of the detected gait cycles. Given those phases we compute specific gait parameters, which are used for medical diagnosis. The results of our pathological gait analyzer are validated using ground truth data from a GAITRite system. The results presented in this paper demonstrate that the proposed human data analysis scheme has the potential to provide the necessary methodological (modeling, inference, and learning) framework for a cognitive behavior- based robot control system.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } During the past decade, robotic technology has evolved considerably towards the development of cognitive robotic systems that enable close interaction with humans. Application fields of such novel robotic technologies are now wide spreading covering a variety of human assistance function- alities, aiming in particular at supporting the needs of human beings experiencing various forms of mobility or cognitive impairments. Mobility impairments are prevalent in the elderly population and constitute one of the main causes related to difficulties in performing Activities of Daily Living (ADLs) and consequent reduction of quality of life. This paper re- ports current research work related to the development of a pathological gait analyzer for intelligent robotic rollator aiming to be an input to a user-adaptive and context-aware robot control architecture. Specifically, we present a novel method for human leg tracking using Particle Filters and Probablistic Data Association from a laser scanner, constituting a non- wearable and non-intrusive approach. The tracked positions and velocities of the user’s legs are the observables of an HMM, which provides the gait phases of the detected gait cycles. Given those phases we compute specific gait parameters, which are used for medical diagnosis. The results of our pathological gait analyzer are validated using ground truth data from a GAITRite system. The results presented in this paper demonstrate that the proposed human data analysis scheme has the potential to provide the necessary methodological (modeling, inference, and learning) framework for a cognitive behavior- based robot control system. |
A C Dometios, A Tsiami, A Arvanitakis, P Giannoulis, X S Papageorgiou, C S Tzafestas, P Maragos Integrated Speech-based Perception System for User Adaptive Robot Motion Planning in Assistive Bath Scenarios Conference Proc. of the 25th European Signal Processing Conference - Workshop: "MultiLearn 2017 - Multimodal processing, modeling and learning for human-computer/robot interaction applications", Kos, Greece, 2017. Abstract | BibTeX | Links: [PDF] @conference{DTAGPTM17, title = {Integrated Speech-based Perception System for User Adaptive Robot Motion Planning in Assistive Bath Scenarios}, author = {A C Dometios and A Tsiami and A Arvanitakis and P Giannoulis and X S Papageorgiou and C S Tzafestas and P Maragos}, url = {http://www.eurasip.org/Proceedings/Eusipco/Eusipco2017/wpapers/ML5.pdf}, year = {2017}, date = {2017-09-01}, booktitle = {Proc. of the 25th European Signal Processing Conference - Workshop: "MultiLearn 2017 - Multimodal processing, modeling and learning for human-computer/robot interaction applications"}, address = {Kos, Greece}, abstract = {Elderly people have augmented needs in performing bathing activities, since these tasks require body flexibility. Our aim is to build an assistive robotic bath system, in order to increase the independence and safety of this procedure. Towards this end, the expertise of professional carers for bathing sequences and appropriate motions have to be adopted, in order to achieve natural, physical human - robot interaction. The integration of the communication and verbal interaction between the user and the robot during the bathing tasks is a key issue for such a challenging assistive robotic application. In this paper, we tackle this challenge by developing a novel integrated real-time speech-based perception system, which will provide the necessary assistance to the frail senior citizens. This system can be suitable for installation and use in conventional home or hospital bathroom space. We employ both a speech recognition system with sub-modules to achieve a smooth and robust human-system communication and a low cost depth camera or end-effector motion planning. With a variety of spoken commands, the system can be adapted to the user’s needs and preferences. The instructed by the user washing commands are executed by a robotic manipulator, demonstrating the progress of each task. The smooth integration of ll subsystems is accomplished by a modular and hierarchical decision architecture organized as a Behavior Tree. The system was experimentally tested by successful execution of scenarios from different users with different preferences.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Elderly people have augmented needs in performing bathing activities, since these tasks require body flexibility. Our aim is to build an assistive robotic bath system, in order to increase the independence and safety of this procedure. Towards this end, the expertise of professional carers for bathing sequences and appropriate motions have to be adopted, in order to achieve natural, physical human - robot interaction. The integration of the communication and verbal interaction between the user and the robot during the bathing tasks is a key issue for such a challenging assistive robotic application. In this paper, we tackle this challenge by developing a novel integrated real-time speech-based perception system, which will provide the necessary assistance to the frail senior citizens. This system can be suitable for installation and use in conventional home or hospital bathroom space. We employ both a speech recognition system with sub-modules to achieve a smooth and robust human-system communication and a low cost depth camera or end-effector motion planning. With a variety of spoken commands, the system can be adapted to the user’s needs and preferences. The instructed by the user washing commands are executed by a robotic manipulator, demonstrating the progress of each task. The smooth integration of ll subsystems is accomplished by a modular and hierarchical decision architecture organized as a Behavior Tree. The system was experimentally tested by successful execution of scenarios from different users with different preferences. |
A C Dometios, X S Papageorgiou, A Arvanitakis, C S Tzafestas, P Maragos Real-time End-effector Motion Behavior Planning Approach Using On-line Point-cloud Data Towards a User Adaptive Assistive Bath Robot Conference 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, Canada, 2017. Abstract | BibTeX | Links: [PDF] @conference{DPATM17, title = {Real-time End-effector Motion Behavior Planning Approach Using On-line Point-cloud Data Towards a User Adaptive Assistive Bath Robot}, author = {A C Dometios and X S Papageorgiou and A Arvanitakis and C S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/Dometios17_End-Effector_Motion_Behavior_Planning_PointCloud.pdf}, doi = {10.1109/IROS.2017.8206387}, year = {2017}, date = {2017-09-01}, booktitle = {2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages = {5031-5036}, address = {Vancouver, Canada}, abstract = {Elderly people have particular needs in performing bathing activities, since these tasks require body flexibility. Our aim is to build an assistive robotic bath system, in order to increase the independence and safety of this procedure. Towards this end, the expertise of professional carers for bathing sequences and appropriate motions has to be adopted, in order to achieve natural, physical human - robot interaction. In this paper, a real-time end-effector motion planning method for an assistive bath robot, using on-line Point-Cloud information, is proposed. The visual feedback obtained from Kinect depth sensor is employed to adapt suitable washing paths to the user’s body part motion and deformable surface. We make use of a navigation function-based controller, with guarantied globally uniformly asymptotic stability, and bijective transformations for the adaptation of the paths. Experiments were conducted with a rigid rectangular object for validation purposes, while a female subject took part to the experiment in order to evaluate and demonstrate the basic concepts of the proposed methodology.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Elderly people have particular needs in performing bathing activities, since these tasks require body flexibility. Our aim is to build an assistive robotic bath system, in order to increase the independence and safety of this procedure. Towards this end, the expertise of professional carers for bathing sequences and appropriate motions has to be adopted, in order to achieve natural, physical human - robot interaction. In this paper, a real-time end-effector motion planning method for an assistive bath robot, using on-line Point-Cloud information, is proposed. The visual feedback obtained from Kinect depth sensor is employed to adapt suitable washing paths to the user’s body part motion and deformable surface. We make use of a navigation function-based controller, with guarantied globally uniformly asymptotic stability, and bijective transformations for the adaptation of the paths. Experiments were conducted with a rigid rectangular object for validation purposes, while a female subject took part to the experiment in order to evaluate and demonstrate the basic concepts of the proposed methodology. |
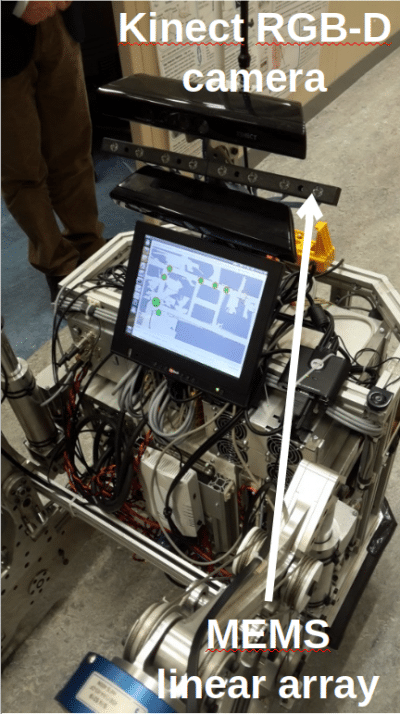
G Chalvatzaki, X S Papageorgiou, C S Tzafestas Towards a user-adaptive context-aware robotic walker with a pathological gait assessment system: First experimental study Conference IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017. Abstract | BibTeX | Links: [PDF] @conference{CPT17, title = {Towards a user-adaptive context-aware robotic walker with a pathological gait assessment system: First experimental study}, author = {G Chalvatzaki and X S Papageorgiou and C S Tzafestas}, url = {http://robotics.ntua.gr/wp-content/publications/CPT17.pdf}, doi = {10.1109/IROS.2017.8206388}, year = {2017}, date = {2017-09-01}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages = {5037-5042}, abstract = {When designing a user-friendly Mobility Assistive Device (MAD) for mobility constrained people, it is important to take into account the diverse spectrum of disabilities, which results to completely different needs to be covered by the MAD for each specific user. An intelligent adaptive behavior is necessary. In this work we present experimental results, using an in house developed methodology for assessing the gait of users with different mobility status while interacting with a robotic MAD. We use data from a laser scanner, mounted on the MAD to track the legs using Particle Filters and Probabilistic Data Association (PDA-PF). The legs' states are fed to an HMM-based pathological gait cycle recognition system to compute in real-time the gait parameters that are crucial for the mobility status characterization of the user. We aim to show that a gait assessment system would be an important feedback for an intelligent MAD. Thus, we use this system to compare the gaits of the subjects using two different control settings of the MAD and we experimentally validate the ability of our system to recognize the impact of the control designs on the users' walking performance. The results demonstrate that a generic control scheme does not meet every patient's needs, and therefore, an Adaptive Context-Aware MAD (ACA MAD), that can understand the specific needs of the user, is important for enhancing the human-robot physical interaction.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } When designing a user-friendly Mobility Assistive Device (MAD) for mobility constrained people, it is important to take into account the diverse spectrum of disabilities, which results to completely different needs to be covered by the MAD for each specific user. An intelligent adaptive behavior is necessary. In this work we present experimental results, using an in house developed methodology for assessing the gait of users with different mobility status while interacting with a robotic MAD. We use data from a laser scanner, mounted on the MAD to track the legs using Particle Filters and Probabilistic Data Association (PDA-PF). The legs' states are fed to an HMM-based pathological gait cycle recognition system to compute in real-time the gait parameters that are crucial for the mobility status characterization of the user. We aim to show that a gait assessment system would be an important feedback for an intelligent MAD. Thus, we use this system to compare the gaits of the subjects using two different control settings of the MAD and we experimentally validate the ability of our system to recognize the impact of the control designs on the users' walking performance. The results demonstrate that a generic control scheme does not meet every patient's needs, and therefore, an Adaptive Context-Aware MAD (ACA MAD), that can understand the specific needs of the user, is important for enhancing the human-robot physical interaction. |
G. Velentzas, C. Tzafestas, M. Khamassi Bio-inspired meta-learning for active exploration during non-stationary multi-armed bandit tasks Conference Proc. IEEE Intelligent Systems Conference, London, UK, 2017. Abstract | BibTeX | Links: [PDF] @conference{BFB97, title = {Bio-inspired meta-learning for active exploration during non-stationary multi-armed bandit tasks}, author = {G. Velentzas and C. Tzafestas and M. Khamassi}, url = {http://robotics.ntua.gr/wp-content/publications/Velentzas_Intellisys2017.pdf}, doi = {10.1109/IntelliSys.2017.8324365}, year = {2017}, date = {2017-09-01}, booktitle = {Proc. IEEE Intelligent Systems Conference}, address = {London, UK}, abstract = {Fast adaptation to changes in the environment requires agents (animals, robots and simulated artefacts) to be able to dynamically tune an exploration-exploitation trade-off during learning. This trade-off usually determines a fixed proportion of exploitative choices (i.e. choice of the action that subjectively appears as best at a given moment) relative to exploratory choices (i.e. testing other actions that now appear worst but may turn out promising later). Rather than using a fixed proportion, non-stationary multi-armed bandit methods in the field of machine learning have proven that principles such as exploring actions that have not been tested for a long time can lead to performance closer to optimal - bounded regret. In parallel, researches in active exploration in the fields of robot learning and computational neuroscience of learning and decision-making have proposed alternative solutions such as transiently increasing exploration in response to drops in average performance, or attributing exploration bonuses specifically to actions associated with high uncertainty in order to gain information when choosing them. In this work, we compare different methods from machine learning, computational neuroscience and robot learning on a set of non-stationary stochastic multi-armed bandit tasks: abrupt shifts; best bandit becomes worst one and vice versa; multiple shifting frequencies. We find that different methods are appropriate in different scenarios. We propose a new hybrid method combining bio-inspired meta-learning, kalman filter and exploration bonuses and show that it outperforms other methods in these scenarios.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Fast adaptation to changes in the environment requires agents (animals, robots and simulated artefacts) to be able to dynamically tune an exploration-exploitation trade-off during learning. This trade-off usually determines a fixed proportion of exploitative choices (i.e. choice of the action that subjectively appears as best at a given moment) relative to exploratory choices (i.e. testing other actions that now appear worst but may turn out promising later). Rather than using a fixed proportion, non-stationary multi-armed bandit methods in the field of machine learning have proven that principles such as exploring actions that have not been tested for a long time can lead to performance closer to optimal - bounded regret. In parallel, researches in active exploration in the fields of robot learning and computational neuroscience of learning and decision-making have proposed alternative solutions such as transiently increasing exploration in response to drops in average performance, or attributing exploration bonuses specifically to actions associated with high uncertainty in order to gain information when choosing them. In this work, we compare different methods from machine learning, computational neuroscience and robot learning on a set of non-stationary stochastic multi-armed bandit tasks: abrupt shifts; best bandit becomes worst one and vice versa; multiple shifting frequencies. We find that different methods are appropriate in different scenarios. We propose a new hybrid method combining bio-inspired meta-learning, kalman filter and exploration bonuses and show that it outperforms other methods in these scenarios. |
G Chalvatzaki, X S Papageorgiou, C S Tzafestas, P Maragos Estimating double support in pathological gaits using an HMM-based analyzer for an intelligent robotic walker Conference IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2017. Abstract | BibTeX | Links: [PDF] @conference{CPTM_ROMAN17, title = {Estimating double support in pathological gaits using an HMM-based analyzer for an intelligent robotic walker}, author = {G Chalvatzaki and X S Papageorgiou and C S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/CPTM_ROMAN17.pdf}, doi = {10.1109/ROMAN.2017.8172287}, year = {2017}, date = {2017-08-01}, booktitle = {IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN)}, pages = {101-106}, abstract = {For a robotic walker designed to assist mobility constrained people, it is important to take into account the different spectrum of pathological walking patterns, which result into completely different needs to be covered for each specific user. For a deployable intelligent assistant robot it is necessary to have a precise gait analysis system, providing real-time monitoring of the user and extracting specific gait parameters, which are associated with the rehabilitation progress and the risk of fall. In this paper, we present a completely non-invasive framework for the on-line analysis of pathological human gait and the recognition of specific gait phases and events. The performance of this gait analysis system is assessed, in particular, as related to the estimation of double support phases, which are typically difficult to extract reliably, especially when applying non-wearable and non-intrusive technologies. Furthermore, the duration of double support phases constitutes an important gait parameter and a critical indicator in pathological gait patterns. The performance of this framework is assessed using real data collected from an ensemble of elderly persons with different pathologies. The estimated gait parameters are experimentally validated using ground truth data provided by a Motion Capture system. The results obtained and presented in this paper demonstrate that the proposed human data analysis (modeling, learning and inference) framework has the potential to support efficient detection and classification of specific walking pathologies, as needed to empower a cognitive robotic mobility-assistance device with user-adaptive and context-aware functionalities.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } For a robotic walker designed to assist mobility constrained people, it is important to take into account the different spectrum of pathological walking patterns, which result into completely different needs to be covered for each specific user. For a deployable intelligent assistant robot it is necessary to have a precise gait analysis system, providing real-time monitoring of the user and extracting specific gait parameters, which are associated with the rehabilitation progress and the risk of fall. In this paper, we present a completely non-invasive framework for the on-line analysis of pathological human gait and the recognition of specific gait phases and events. The performance of this gait analysis system is assessed, in particular, as related to the estimation of double support phases, which are typically difficult to extract reliably, especially when applying non-wearable and non-intrusive technologies. Furthermore, the duration of double support phases constitutes an important gait parameter and a critical indicator in pathological gait patterns. The performance of this framework is assessed using real data collected from an ensemble of elderly persons with different pathologies. The estimated gait parameters are experimentally validated using ground truth data provided by a Motion Capture system. The results obtained and presented in this paper demonstrate that the proposed human data analysis (modeling, learning and inference) framework has the potential to support efficient detection and classification of specific walking pathologies, as needed to empower a cognitive robotic mobility-assistance device with user-adaptive and context-aware functionalities. |
Theodore Tsitsimis, George Velentzas, Mehdi Khamassi, Costas Tzafestas Online adaptation to human engagement perturbations in simulated human-robot interaction using hybrid reinforcement learning Conference Proc. of the 25th European Signal Processing Conference - Workshop: "MultiLearn 2017 - Multimodal processing, modeling and learning for human-computer/robot interaction applications", Kos, Greece, 2017., Kos, Greece, 2017. Abstract | BibTeX | Links: [PDF] @conference{BFB98, title = {Online adaptation to human engagement perturbations in simulated human-robot interaction using hybrid reinforcement learning}, author = {Theodore Tsitsimis and George Velentzas and Mehdi Khamassi and Costas Tzafestas}, editor = {Michael Aron}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/MultiLearn2017.pdf}, year = {2017}, date = {2017-08-01}, booktitle = {Proc. of the 25th European Signal Processing Conference - Workshop: "MultiLearn 2017 - Multimodal processing, modeling and learning for human-computer/robot interaction applications", Kos, Greece, 2017.}, address = {Kos, Greece}, abstract = {Dynamic uncontrolled human-robot interaction requires robots to be able to adapt to changes in the human’s behavior and intentions. Among relevant signals, non-verbal cues such as the human’s gaze can provide the robot with important information about the human’s current engagement in the task, and whether the robot should continue its current behavior or not. In a previous work [1] we proposed an active exploration algorithm for reinforcement learning where the reward function is the weighted sum of the human’s current engagement and variations of this engagement (so that a low but increasing engagement is rewarding). We used a structured (parameterized) continuous action space where a meta-learning algorithm is applied to simultaneously tune the exploration in discrete and continuous action space, enabling the robot to learn which discrete action is expected by the human (e.g. moving an object) and with which velocity of movement. In this paper we want to show the performance of the algorithm to a simulated humanrobot interaction task where a practical approach is followed to estimate human engagement through visual cues of the head pose. We then measure the adaptation of the algorithm to engagement perturbations simulated as changes in the optimal action parameter and we quantify its performance for variations in perturbation duration and measurement noise.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Dynamic uncontrolled human-robot interaction requires robots to be able to adapt to changes in the human’s behavior and intentions. Among relevant signals, non-verbal cues such as the human’s gaze can provide the robot with important information about the human’s current engagement in the task, and whether the robot should continue its current behavior or not. In a previous work [1] we proposed an active exploration algorithm for reinforcement learning where the reward function is the weighted sum of the human’s current engagement and variations of this engagement (so that a low but increasing engagement is rewarding). We used a structured (parameterized) continuous action space where a meta-learning algorithm is applied to simultaneously tune the exploration in discrete and continuous action space, enabling the robot to learn which discrete action is expected by the human (e.g. moving an object) and with which velocity of movement. In this paper we want to show the performance of the algorithm to a simulated humanrobot interaction task where a practical approach is followed to estimate human engagement through visual cues of the head pose. We then measure the adaptation of the algorithm to engagement perturbations simulated as changes in the optimal action parameter and we quantify its performance for variations in perturbation duration and measurement noise. |
G Chalvatzaki, X S Papageorgiou, C S Tzafestas, P Maragos Comparative experimental validation of human gait tracking algorithms for an intelligent robotic rollator Conference IEEE International Conference on Robotics and Automation (ICRA), 2017. Abstract | BibTeX | Links: [PDF] @conference{CPTM_ICRA17, title = {Comparative experimental validation of human gait tracking algorithms for an intelligent robotic rollator}, author = {G Chalvatzaki and X S Papageorgiou and C S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/CPTM_ICRA17.pdf}, doi = {10.1109/ICRA.2017.7989713}, year = {2017}, date = {2017-05-01}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA)}, pages = {6026-6031}, abstract = {Tracking human gait accurately and robustly constitutes a key factor for a smart robotic walker, aiming to provide assistance to patients with different mobility impairment. A context-aware assistive robot needs constant knowledge of the user's kinematic state to assess the gait status and adjust its movement properly to provide optimal assistance. In this work, we experimentally validate the performance of two gait tracking algorithms using data from elderly patients; the first algorithm employs a Kalman Filter (KF), while the second one tracks the user legs separately using two probabilistically associated Particle Filters (PFs). The algorithms are compared according to their accuracy and robustness, using data captured from real experiments, where elderly subjects performed specific walking scenarios with physical assistance from a prototype Robotic Rollator. Sensorial data were provided by a laser rangefinder mounted on the robotic platform recording the movement of the user's legs. The accuracy of the proposed algorithms is analysed and validated with respect to ground truth data provided by a Motion Capture system tracking a set of visual markers worn by the patients. The robustness of the two tracking algorithms is also analysed comparatively in a complex maneuvering scenario. Current experimental findings demonstrate the superior performance of the PFs in difficult cases of occlusions and clutter, where KF tracking often fails.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Tracking human gait accurately and robustly constitutes a key factor for a smart robotic walker, aiming to provide assistance to patients with different mobility impairment. A context-aware assistive robot needs constant knowledge of the user's kinematic state to assess the gait status and adjust its movement properly to provide optimal assistance. In this work, we experimentally validate the performance of two gait tracking algorithms using data from elderly patients; the first algorithm employs a Kalman Filter (KF), while the second one tracks the user legs separately using two probabilistically associated Particle Filters (PFs). The algorithms are compared according to their accuracy and robustness, using data captured from real experiments, where elderly subjects performed specific walking scenarios with physical assistance from a prototype Robotic Rollator. Sensorial data were provided by a laser rangefinder mounted on the robotic platform recording the movement of the user's legs. The accuracy of the proposed algorithms is analysed and validated with respect to ground truth data provided by a Motion Capture system tracking a set of visual markers worn by the patients. The robustness of the two tracking algorithms is also analysed comparatively in a complex maneuvering scenario. Current experimental findings demonstrate the superior performance of the PFs in difficult cases of occlusions and clutter, where KF tracking often fails. |
A Zlatintsi, I Rodomagoulakis, V Pitsikalis, P Koutras, N Kardaris, X Papageorgiou, C Tzafestas, P Maragos Social Human-Robot Interaction for the Elderly: Two Real-life Use Cases, Conference ACM/IEEE International Conference on Human-Robot Interaction (HRI), Vienna, Austria, 2017. Abstract | BibTeX | Links: [PDF] @conference{ZRP+17, title = {Social Human-Robot Interaction for the Elderly: Two Real-life Use Cases,}, author = {A Zlatintsi and I Rodomagoulakis and V Pitsikalis and P Koutras and N Kardaris and X Papageorgiou and C Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/Zlatintsi+_SocialHRIforTheElderly_HRI-17.pdf}, year = {2017}, date = {2017-03-01}, booktitle = {ACM/IEEE International Conference on Human-Robot Interaction (HRI)}, address = {Vienna, Austria}, abstract = {We explore new aspects on assistive living via smart social human-robot interaction (HRI) involving automatic recognition of multimodal gestures and speech in a natural interface, providing social features in HRI. We discuss a whole framework of resources, including datasets and tools, briefly shown in two real-life use cases for elderly subjects: a multimodal interface of an assistive robotic rollator and an assistive bathing robot. We discuss these domain specific tasks, and open source tools, which can be used to build such HRI systems, as well as indicative results. Sharing such resources can open new perspectives in assistive HRI.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } We explore new aspects on assistive living via smart social human-robot interaction (HRI) involving automatic recognition of multimodal gestures and speech in a natural interface, providing social features in HRI. We discuss a whole framework of resources, including datasets and tools, briefly shown in two real-life use cases for elderly subjects: a multimodal interface of an assistive robotic rollator and an assistive bathing robot. We discuss these domain specific tasks, and open source tools, which can be used to build such HRI systems, as well as indicative results. Sharing such resources can open new perspectives in assistive HRI. |
Mehdi Khamassi, George Velentzas, Theodore Tsitsimis, Costas Tzafestas Active exploration and parameterized reinforcement learning applied to a simulated human-robot interaction task Conference Proceedings - 2017 1st IEEE International Conference on Robotic Computing, IRC 2017, 2017, ISBN: 9781509067237. Abstract | BibTeX | Links: [PDF] @conference{337, title = {Active exploration and parameterized reinforcement learning applied to a simulated human-robot interaction task}, author = { Mehdi Khamassi and George Velentzas and Theodore Tsitsimis and Costas Tzafestas}, url = {http://ieeexplore.ieee.org/document/7926511/%0Ahttp://ieeexplore.ieee.org/ielx7/7925476/7926477/07926511.pdf?tp=&arnumber=7926511&isnumber=7926477}, doi = {10.1109/IRC.2017.33}, isbn = {9781509067237}, year = {2017}, date = {2017-01-01}, booktitle = {Proceedings - 2017 1st IEEE International Conference on Robotic Computing, IRC 2017}, pages = {28--35}, abstract = {textcopyright 2017 IEEE. Online model-free reinforcement learning (RL) methods with continuous actions are playing a prominent role when dealing with real-world applications such as Robotics. However, when confronted to non-stationary environments, these methods crucially rely on an exploration-exploitation trade-off which is rarely dynamically and automatically adjusted to changes in the environment. Here we propose an active exploration algorithm for RL in structured (parameterized) continuous action space. This framework deals with a set of discrete actions, each of which is parameterized with continuous variables. Discrete exploration is controlled through a Boltzmann softmax function with an inverse temperature $beta$ parameter. In parallel, a Gaussian exploration is applied to the continuous action parameters. We apply a meta-learning algorithm based on the comparison between variations of short-Term and long-Term reward running averages to simultaneously tune $beta$ and the width of the Gaussian distribution from which continuous action parameters are drawn. We first show that this algorithm reaches state-of-The-Art performance in the non-stationary multi-Armed bandit paradigm, while also being generalizable to continuous actions and multi-step tasks. We then apply it to a simulated human-robot interaction task, and show that it outperforms continuous parameterized RL both without active exploration and with active exploration based on uncertainty variations measured by a Kalman-Q-learning algorithm.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } textcopyright 2017 IEEE. Online model-free reinforcement learning (RL) methods with continuous actions are playing a prominent role when dealing with real-world applications such as Robotics. However, when confronted to non-stationary environments, these methods crucially rely on an exploration-exploitation trade-off which is rarely dynamically and automatically adjusted to changes in the environment. Here we propose an active exploration algorithm for RL in structured (parameterized) continuous action space. This framework deals with a set of discrete actions, each of which is parameterized with continuous variables. Discrete exploration is controlled through a Boltzmann softmax function with an inverse temperature $beta$ parameter. In parallel, a Gaussian exploration is applied to the continuous action parameters. We apply a meta-learning algorithm based on the comparison between variations of short-Term and long-Term reward running averages to simultaneously tune $beta$ and the width of the Gaussian distribution from which continuous action parameters are drawn. We first show that this algorithm reaches state-of-The-Art performance in the non-stationary multi-Armed bandit paradigm, while also being generalizable to continuous actions and multi-step tasks. We then apply it to a simulated human-robot interaction task, and show that it outperforms continuous parameterized RL both without active exploration and with active exploration based on uncertainty variations measured by a Kalman-Q-learning algorithm. |
X S Papageorgiou, G Chalvatzaki, A Dometios, C S Tzafestas, P Maragos Intelligent Assistive Robotic Systems for the Elderly: Two Real-life Use Cases Conference C_PETRA, ACM, Island of Rhodes, Greece, 2017, ISBN: 978-1-4503-5227-7. Abstract | BibTeX | Links: [PDF] @conference{PETRA2017, title = {Intelligent Assistive Robotic Systems for the Elderly: Two Real-life Use Cases}, author = {X S Papageorgiou and G Chalvatzaki and A Dometios and C S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/PETRA2017.pdf}, doi = {10.1145/3056540.3076184}, isbn = {978-1-4503-5227-7}, year = {2017}, date = {2017-01-01}, booktitle = {C_PETRA}, pages = {360--365}, publisher = {ACM}, address = {Island of Rhodes, Greece}, abstract = {Mobility impairments are prevalent in the elderly population and constitute one of the main causes related to difficulties in performing Activities of Daily Living (ADLs) and consequent reduction of quality of life. When designing a user-friendly assistive device for mobility constrained people, it is important to take into account the diverse spectrum of disabilities, which results into completely different needs to be covered by the device for each specific user. An intelligent adaptive behavior is necessary for the deployment of such systems. Also, elderly people have particular needs in specific case of performing bathing activities, since these tasks require body flexibility. We explore new aspects of assistive living via intelligent assistive robotic systems involving human robot interaction in a natural interface. Our aim is to build assistive robotic systems, in order to increase the independence and safety of these procedures. Towards this end, the expertise of professional carers for walking or bathing sequences and appropriate motions have to be adopted, in order to achieve natural, physical human - robot interaction. Our goal is to report current research work related to the development of two real-life use cases of intelligent robotic systems for elderly aiming to provide user-adaptive and context-aware assistance.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Mobility impairments are prevalent in the elderly population and constitute one of the main causes related to difficulties in performing Activities of Daily Living (ADLs) and consequent reduction of quality of life. When designing a user-friendly assistive device for mobility constrained people, it is important to take into account the diverse spectrum of disabilities, which results into completely different needs to be covered by the device for each specific user. An intelligent adaptive behavior is necessary for the deployment of such systems. Also, elderly people have particular needs in specific case of performing bathing activities, since these tasks require body flexibility. We explore new aspects of assistive living via intelligent assistive robotic systems involving human robot interaction in a natural interface. Our aim is to build assistive robotic systems, in order to increase the independence and safety of these procedures. Towards this end, the expertise of professional carers for walking or bathing sequences and appropriate motions have to be adopted, in order to achieve natural, physical human - robot interaction. Our goal is to report current research work related to the development of two real-life use cases of intelligent robotic systems for elderly aiming to provide user-adaptive and context-aware assistance. |
G. Velentzas, C. Tzafestas, M. Khamassi Bridging Computational Neuroscience and Machine Learning on Non-Stationary Multi-Armed Bandits Miscellaneous bioRxiv, 117598, 2017. Abstract | BibTeX | Links: [PDF] @misc{BFB96, title = {Bridging Computational Neuroscience and Machine Learning on Non-Stationary Multi-Armed Bandits}, author = {G. Velentzas and C. Tzafestas and M. Khamassi }, url = {http://robotics.ntua.gr/wp-content/publications/Velentzas_RLDM2017.pdf}, doi = {10.1101/117598}, year = {2017}, date = {2017-06-01}, address = {Ann Arbor, USA}, abstract = {Fast adaptation to changes in the environment requires both natural and artificial agents to be able to dynamically tune an exploration-exploitation trade-off during learning. This trade-off usually determines a fixed proportion of exploitative choices (i.e. choice of the action that subjectively appears as best at a given moment) relative to exploratory choices (i.e. testing other actions that now appear worst but may turn out promising later). The problem of finding an efficient exploration-exploitation trade-off has been well studied both in the Machine Learning and Computational Neuroscience fields. Rather than using a fixed proportion, non-stationary multi-armed bandit methods in the former have proven that principles such as exploring actions that have not been tested for a long time can lead to performance closer to optimal - bounded regret. In parallel, researches in the latter have investigated solutions such as progressively increasing exploita- tion in response to improvements of performance, transiently increasing exploration in response to drops in average performance, or attributing exploration bonuses specifically to actions associated with high uncertainty in order to gain information when performing these actions. In this work, we first try to bridge some of these different methods from the two research fields by rewriting their decision process with a common formalism. We then show numerical simulations of a hybrid algorithm combining bio-inspired meta-learning, kalman filter and exploration bonuses compared to several state-of-the-art alternatives on a set of non-stationary stochastic multi-armed bandit tasks. While we find that different methods are appropriate in different scenarios, the hybrid algorithm displays a good combination of advantages from different methods and outperforms these methods in the studied scenarios.}, howpublished = {bioRxiv, 117598}, keywords = {}, pubstate = {published}, tppubtype = {misc} } Fast adaptation to changes in the environment requires both natural and artificial agents to be able to dynamically tune an exploration-exploitation trade-off during learning. This trade-off usually determines a fixed proportion of exploitative choices (i.e. choice of the action that subjectively appears as best at a given moment) relative to exploratory choices (i.e. testing other actions that now appear worst but may turn out promising later). The problem of finding an efficient exploration-exploitation trade-off has been well studied both in the Machine Learning and Computational Neuroscience fields. Rather than using a fixed proportion, non-stationary multi-armed bandit methods in the former have proven that principles such as exploring actions that have not been tested for a long time can lead to performance closer to optimal - bounded regret. In parallel, researches in the latter have investigated solutions such as progressively increasing exploita- tion in response to improvements of performance, transiently increasing exploration in response to drops in average performance, or attributing exploration bonuses specifically to actions associated with high uncertainty in order to gain information when performing these actions. In this work, we first try to bridge some of these different methods from the two research fields by rewriting their decision process with a common formalism. We then show numerical simulations of a hybrid algorithm combining bio-inspired meta-learning, kalman filter and exploration bonuses compared to several state-of-the-art alternatives on a set of non-stationary stochastic multi-armed bandit tasks. While we find that different methods are appropriate in different scenarios, the hybrid algorithm displays a good combination of advantages from different methods and outperforms these methods in the studied scenarios. |
2016 |
John N Karigiannis, Costas S Tzafestas Model-free learning on robot kinematic chains using a nested multi-agent topology Journal Article Journal of Experimental and Theoretical Artificial Intelligence, 28 (6), pp. 913–954, 2016, ISSN: 13623079. Abstract | BibTeX | Links: [PDF] @article{321, title = {Model-free learning on robot kinematic chains using a nested multi-agent topology}, author = {John N Karigiannis and Costas S Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Model-free-learning-on-robot-kinematic-chains-using-a-nested-multi-agent-topology.pdf}, doi = {10.1080/0952813X.2015.1042923}, issn = {13623079}, year = {2016}, date = {2016-01-01}, journal = {Journal of Experimental and Theoretical Artificial Intelligence}, volume = {28}, number = {6}, pages = {913--954}, abstract = {This paper proposes a model-free learning scheme for the developmental acquisition of robot kinematic control and dexterous manipulation skills. The approach is based on a nested-hierarchical multi-agent architecture that intuitively encapsulates the topology of robot kinematic chains, where the activity of each independent degree-of-freedom (DOF) is finally mapped onto a distinct agent. Each one of those agents progressively evolves a local kinematic control strategy in a game-theoretic sense, that is, based on a partial (local) view of the whole system topology, which is incrementally updated through a recursive communication process according to the nested-hierarchical topology. Learning is thus approached not through demonstration and training but through an autonomous self-exploration process. A fuzzy reinforcement learning scheme is employed within each agent to enable efficient exploration in a continuous state–action domain. This paper constitutes in fact a proof of concept, demonstrating that glo...}, keywords = {}, pubstate = {published}, tppubtype = {article} } This paper proposes a model-free learning scheme for the developmental acquisition of robot kinematic control and dexterous manipulation skills. The approach is based on a nested-hierarchical multi-agent architecture that intuitively encapsulates the topology of robot kinematic chains, where the activity of each independent degree-of-freedom (DOF) is finally mapped onto a distinct agent. Each one of those agents progressively evolves a local kinematic control strategy in a game-theoretic sense, that is, based on a partial (local) view of the whole system topology, which is incrementally updated through a recursive communication process according to the nested-hierarchical topology. Learning is thus approached not through demonstration and training but through an autonomous self-exploration process. A fuzzy reinforcement learning scheme is employed within each agent to enable efficient exploration in a continuous state–action domain. This paper constitutes in fact a proof of concept, demonstrating that glo... |
A Guler, N Kardaris, S Chandra, V Pitsikalis, C Werner, K Hauer, C Tzafestas, P Maragos, I Kokkinos Human Joint Angle Estimation and Gesture Recognition for Assistive Robotic Vision Conference Proc. of Workshop on Assistive Computer Vision and Robotics, European Conf. on Computer Vision (ECCV-2016), Amsterdam, The Netherlands, 2016. Abstract | BibTeX | Links: [PDF] @conference{guler_joint_gesture_2016, title = {Human Joint Angle Estimation and Gesture Recognition for Assistive Robotic Vision}, author = {A Guler and N Kardaris and S Chandra and V Pitsikalis and C Werner and K Hauer and C Tzafestas and P Maragos and I Kokkinos}, url = {http://robotics.ntua.gr/wp-content/publications/PoseEstimGestureRecogn-AssistRobotVision_ACVR2016-ECCV-Workshop.pdf}, doi = {10.1007/978-3-319-48881-3_29}, year = {2016}, date = {2016-10-01}, booktitle = {Proc. of Workshop on Assistive Computer Vision and Robotics, European Conf. on Computer Vision (ECCV-2016)}, address = {Amsterdam, The Netherlands}, abstract = {We explore new directions for automatic human gesture recognition and human joint angle estimation as applied for human-robot interaction in the context of an actual challenging task of assistive living for real-life elderly subjects. Our contributions include state-of-the-art approaches for both low- and mid-level vision, as well as for higher level action and gesture recognition. The first direction investigates a deep learning based framework for the challenging task of human joint angle estimation on noisy real world RGB-D images. The second direction includes the employment of dense trajectory features for online processing of videos for automatic gesture recognition with real-time performance. Our approaches are evaluated both qualitative and quantitatively on a newly acquired dataset that is constructed on a challenging real-life scenario on assistive living for elderly subjects.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } We explore new directions for automatic human gesture recognition and human joint angle estimation as applied for human-robot interaction in the context of an actual challenging task of assistive living for real-life elderly subjects. Our contributions include state-of-the-art approaches for both low- and mid-level vision, as well as for higher level action and gesture recognition. The first direction investigates a deep learning based framework for the challenging task of human joint angle estimation on noisy real world RGB-D images. The second direction includes the employment of dense trajectory features for online processing of videos for automatic gesture recognition with real-time performance. Our approaches are evaluated both qualitative and quantitatively on a newly acquired dataset that is constructed on a challenging real-life scenario on assistive living for elderly subjects. |
G Chalvatzaki, X S Papageorgiou, C Werner, K Hauer, C S Tzafestas, P Maragos Experimental comparison of human gait tracking algorithms: Towards a context-aware mobility assistance robotic walker Conference Mediterranean Conference on Control and Automation (MED), 2016. Abstract | BibTeX | Links: [PDF] @conference{CPWHTM16, title = {Experimental comparison of human gait tracking algorithms: Towards a context-aware mobility assistance robotic walker}, author = {G Chalvatzaki and X S Papageorgiou and C Werner and K Hauer and C S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/CPWHTM16.pdf}, doi = {10.1109/MED.2016.7535962}, year = {2016}, date = {2016-06-01}, booktitle = {Mediterranean Conference on Control and Automation (MED)}, pages = {719-724}, abstract = {Towards a mobility assistance robot for the elderly, it is essential to develop a robust and accurate gait tracking system. Various pathologies cause mobility inabilities to the aged population, leading to different gait patterns and walking speed. In this work, we present the experimental comparison of two user leg tracking systems of a robotic assistance walker, using data collected by a laser range sensor. The first one is a Kalman Filter tracking system, while the second one proposes the use of Particle Filters. The tracking systems provide the positions and velocities of the user's legs, which are used as observations into an HMM-based gait phases recognition system. The spatiotemporal results of the HMM framework are employed for computing parameters that characterize the human motion, which subsequently can be used to assess and distinguish between possible motion disabilities. For the experimental comparison, we are using real data collected from an ensemble of different elderly persons with a number of pathologies, and ground truth data from a GaitRite System. The results presented in this work, demonstrate the applicability of the tracking systems in real test cases.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Towards a mobility assistance robot for the elderly, it is essential to develop a robust and accurate gait tracking system. Various pathologies cause mobility inabilities to the aged population, leading to different gait patterns and walking speed. In this work, we present the experimental comparison of two user leg tracking systems of a robotic assistance walker, using data collected by a laser range sensor. The first one is a Kalman Filter tracking system, while the second one proposes the use of Particle Filters. The tracking systems provide the positions and velocities of the user's legs, which are used as observations into an HMM-based gait phases recognition system. The spatiotemporal results of the HMM framework are employed for computing parameters that characterize the human motion, which subsequently can be used to assess and distinguish between possible motion disabilities. For the experimental comparison, we are using real data collected from an ensemble of different elderly persons with a number of pathologies, and ground truth data from a GaitRite System. The results presented in this work, demonstrate the applicability of the tracking systems in real test cases. |
X S Papageorgiou, G Chalvatzaki, K N Lianos, C Werner, K Hauer, C S Tzafestas, P Maragos Experimental validation of human pathological gait analysis for an assisted living intelligent robotic walker Conference C_BIOROB, 2016. Abstract | BibTeX | Links: [PDF] @conference{BIOROB2016, title = {Experimental validation of human pathological gait analysis for an assisted living intelligent robotic walker}, author = {X S Papageorgiou and G Chalvatzaki and K N Lianos and C Werner and K Hauer and C S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/BIOROB2016.pdf}, doi = {10.1109/BIOROB.2016.7523776}, year = {2016}, date = {2016-06-01}, booktitle = {C_BIOROB}, pages = {1086-1091}, abstract = {A robust and effective gait analysis functionality is an essential characteristic for an assistance mobility robot dealing with elderly persons. The aforementioned functionality is crucial for dealing with mobility disabilities which are widespread in these parts of the population. In this work we present experimental validation of our in house developed system. We are using real data, collected from an ensemble of different elderly persons with a number of pathologies, and we present a validation study by using a GaitRite System. Our system, following the standard literature conventions, characterizes the human motion with a set of parameters which subsequently can be used to assess and distinguish between possible motion disabilities, using a laser range finder as its main sensor. The initial results, presented in this work, demonstrate the applicability of our framework in real test cases. Regarding such frameworks, a crucial technical question is the necessary complexity of the overall tracking system. To answer this question, we compare two approaches with different complexity levels. The first is a static rule based system acting on filtered laser data, while the second system utilizes a Hidden Markov Model for gait cycle estimation, and extraction of the gait parameters. The results demonstrate that the added complexity of the HMM system is necessary for improving the accuracy and efficacy of the system.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } A robust and effective gait analysis functionality is an essential characteristic for an assistance mobility robot dealing with elderly persons. The aforementioned functionality is crucial for dealing with mobility disabilities which are widespread in these parts of the population. In this work we present experimental validation of our in house developed system. We are using real data, collected from an ensemble of different elderly persons with a number of pathologies, and we present a validation study by using a GaitRite System. Our system, following the standard literature conventions, characterizes the human motion with a set of parameters which subsequently can be used to assess and distinguish between possible motion disabilities, using a laser range finder as its main sensor. The initial results, presented in this work, demonstrate the applicability of our framework in real test cases. Regarding such frameworks, a crucial technical question is the necessary complexity of the overall tracking system. To answer this question, we compare two approaches with different complexity levels. The first is a static rule based system acting on filtered laser data, while the second system utilizes a Hidden Markov Model for gait cycle estimation, and extraction of the gait parameters. The results demonstrate that the added complexity of the HMM system is necessary for improving the accuracy and efficacy of the system. |
A C Dometios, X S Papageorgiou, C S Tzafestas, P Vartholomeos Towards ICT-supported Bath Robots: Control Architecture Description and Localized Perception of User for Robot Motion Planning Conference Mediterranean Conference on Control and Automation (MED), Athens, Greece, 2016. Abstract | BibTeX | Links: [PDF] @conference{DPTV16, title = {Towards ICT-supported Bath Robots: Control Architecture Description and Localized Perception of User for Robot Motion Planning}, author = {A C Dometios and X S Papageorgiou and C S Tzafestas and P Vartholomeos}, url = {http://robotics.ntua.gr/wp-content/publications/Dometios16_Control_Architecture_Description_Motion_Planning.pdf}, doi = {10.1109/MED.2016.7535954}, year = {2016}, date = {2016-06-01}, booktitle = {Mediterranean Conference on Control and Automation (MED)}, pages = {713-718}, address = {Athens, Greece}, abstract = {Τhis paper describes the general control architecture and the basic implementation concepts of a bath service robotic system. The goal of this system is to support and enhance elderly’s mobility, manipulation and force exertion abilities and assist them in successfully, safely and independently completing the entire sequence of showering and drying tasks, such as properly washing their back and lower limbs. This service robotic system is based on soft-robotic arms which,together with advanced human-robot force/compliance control will form the basis for a safe physical human-robot interaction that complies with the most up-to-date safety standards. In this paper an overview of the bath robotic system components is presented, and the basic modules that contribute to the overall control architecture of the system are described. Moreover, this paper proposed an algorithm that performs efficient processing of feedback data provided by a depth sensor. This algorithm supports local shape perception and geometric characterization of user body parts and will form the basis for further implementation of surface reconstruction and robot motion planning algorithms.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Τhis paper describes the general control architecture and the basic implementation concepts of a bath service robotic system. The goal of this system is to support and enhance elderly’s mobility, manipulation and force exertion abilities and assist them in successfully, safely and independently completing the entire sequence of showering and drying tasks, such as properly washing their back and lower limbs. This service robotic system is based on soft-robotic arms which,together with advanced human-robot force/compliance control will form the basis for a safe physical human-robot interaction that complies with the most up-to-date safety standards. In this paper an overview of the bath robotic system components is presented, and the basic modules that contribute to the overall control architecture of the system are described. Moreover, this paper proposed an algorithm that performs efficient processing of feedback data provided by a depth sensor. This algorithm supports local shape perception and geometric characterization of user body parts and will form the basis for further implementation of surface reconstruction and robot motion planning algorithms. |
2015 |
X S Papageorgiou, C S Tzafestas, C Vartholomeos Laschi, R Lopez ICT-Supported Bath Robots: Design Concepts Conference C_ICSR, 2015. Abstract | BibTeX | Links: [PDF] @conference{ICSR2015_1, title = {ICT-Supported Bath Robots: Design Concepts}, author = {X S Papageorgiou and C S Tzafestas and C Vartholomeos Laschi and R Lopez}, url = {http://robotics.ntua.gr/wp-content/publications/ICSR2015_1.pdf}, year = {2015}, date = {2015-10-01}, booktitle = {C_ICSR}, abstract = {This paper presents the concept and the architecture of the I-SUPPORT service robotics system. The goal of the I-SUPPORT system is to support and enhance older adults mobility, manipulation and force exertion abilities and assist them in successfully, safely and independently completing the entire sequence of showering tasks, such as properly washing their back, their upper parts, their lower limbs, their buttocks and groin, and to effectively use the towel for drying purposes. Adaptation and integration of state-of-the-art, cost-effective, soft-robotic arms will provide the hardware constituents, which, together with advanced human-robot force/compliance control will form the basis for a safe physical human-robot interaction that complies with the most up-to-date safety standards. Human behavioural, sociological, safety, ethical and acceptability aspects, as well as financial factors related to the proposed service robotics system will be thoroughly investigated and evaluated so that the I-SUPPORT end result is a close-to-market prototype, applicable to realistic living settings.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } This paper presents the concept and the architecture of the I-SUPPORT service robotics system. The goal of the I-SUPPORT system is to support and enhance older adults mobility, manipulation and force exertion abilities and assist them in successfully, safely and independently completing the entire sequence of showering tasks, such as properly washing their back, their upper parts, their lower limbs, their buttocks and groin, and to effectively use the towel for drying purposes. Adaptation and integration of state-of-the-art, cost-effective, soft-robotic arms will provide the hardware constituents, which, together with advanced human-robot force/compliance control will form the basis for a safe physical human-robot interaction that complies with the most up-to-date safety standards. Human behavioural, sociological, safety, ethical and acceptability aspects, as well as financial factors related to the proposed service robotics system will be thoroughly investigated and evaluated so that the I-SUPPORT end result is a close-to-market prototype, applicable to realistic living settings. |
G Papageorgiou X.S. Moustris, G Pitsikalis V. Chalvatzaki, A Dometios, N Kardaris, C S Tzafestas, P Maragos User-Oriented Cognitive Interaction and Control for an Intelligent Robotic Walker Conference 17th International Conference on Social Robotics (ICSR 2015), 2015. Abstract | BibTeX | Links: [PDF] @conference{ICSR2015_2, title = {User-Oriented Cognitive Interaction and Control for an Intelligent Robotic Walker}, author = {G Papageorgiou X.S. Moustris and G Pitsikalis V. Chalvatzaki and A Dometios and N Kardaris and C S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/ICSR2015_2.pdf}, year = {2015}, date = {2015-10-01}, booktitle = {17th International Conference on Social Robotics (ICSR 2015)}, abstract = {Mobility impairments are prevalent in the elderly population and constitute one of the main causes related to difficulties in performing Activities of Daily Living (ADLs) and consequent reduction of quality of life. This paper reports current research work related to the control of an intelligent robotic rollator aiming to provide user-adaptive and context-aware walking assistance. To achieve such targets, a large spectrum of multimodal sensory processing and interactive control modules need to be developed and seamlessly integrated, that can, on one side track and analyse human motions and actions, in order to detect pathological situations and estimate user needs, while predicting at the same time the user (short-term or long-range) intentions in order to adapt robot control actions and supportive behaviours accordingly. User-oriented human-robot interaction and control refers to the functionalities that couple the motions, the actions and, in more general terms, the behaviours of the assistive robotic device to the user in a non-physical interaction context.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Mobility impairments are prevalent in the elderly population and constitute one of the main causes related to difficulties in performing Activities of Daily Living (ADLs) and consequent reduction of quality of life. This paper reports current research work related to the control of an intelligent robotic rollator aiming to provide user-adaptive and context-aware walking assistance. To achieve such targets, a large spectrum of multimodal sensory processing and interactive control modules need to be developed and seamlessly integrated, that can, on one side track and analyse human motions and actions, in order to detect pathological situations and estimate user needs, while predicting at the same time the user (short-term or long-range) intentions in order to adapt robot control actions and supportive behaviours accordingly. User-oriented human-robot interaction and control refers to the functionalities that couple the motions, the actions and, in more general terms, the behaviours of the assistive robotic device to the user in a non-physical interaction context. |
G Chalvatzaki, X S Papageorgiou, C S Tzafestas Gait Modelling for a Context-Aware User-Adaptive Robotic Assistant Platform Conference 2015, ISSN: 978-88-97999-63-8. Abstract | BibTeX | Links: [PDF] @conference{CPT15, title = {Gait Modelling for a Context-Aware User-Adaptive Robotic Assistant Platform}, author = {G Chalvatzaki and X S Papageorgiou and C S Tzafestas}, url = {http://robotics.ntua.gr/wp-content/publications/CPT15.pdf}, issn = {978-88-97999-63-8}, year = {2015}, date = {2015-09-01}, pages = {132-141}, abstract = {For a context-aware robotic assistant platform that follows patients with moderate mobility impairment and adapts its motion to the patient?s needs, the de- velopment of an efficient leg tracker and the recogni- tion of pathological gait are very important. In this work, we present the basic concept for the robot con- trol architecture and analyse three essential parts of the Adaptive Context-Aware Robot Control scheme; the detection and tracking of the subject?s legs, the gait modelling and classification and the computation of gait parameters for the impairment level assess- ment. We initially process raw laser data and estimate the legs? position and velocity with a Kalman Filter and then use this information as input for a Hidden Markov Model-based framework that detects specific gait patterns and classifies human gait into normal or pathological. We then compute gait parameters com- monly used for medical diagnosis. The recognised gait patterns along with the gait parameters will be used for the impairment level assessment, which will activate certain control assistive actions regarding the pathological state of the patient.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } For a context-aware robotic assistant platform that follows patients with moderate mobility impairment and adapts its motion to the patient?s needs, the de- velopment of an efficient leg tracker and the recogni- tion of pathological gait are very important. In this work, we present the basic concept for the robot con- trol architecture and analyse three essential parts of the Adaptive Context-Aware Robot Control scheme; the detection and tracking of the subject?s legs, the gait modelling and classification and the computation of gait parameters for the impairment level assess- ment. We initially process raw laser data and estimate the legs? position and velocity with a Kalman Filter and then use this information as input for a Hidden Markov Model-based framework that detects specific gait patterns and classifies human gait into normal or pathological. We then compute gait parameters com- monly used for medical diagnosis. The recognised gait patterns along with the gait parameters will be used for the impairment level assessment, which will activate certain control assistive actions regarding the pathological state of the patient. |
X S Papageorgiou, G Chalvatzaki, C S Tzafestas, P Maragos Hidden markov modeling of human pathological gait using laser range finder for an assisted living intelligent robotic walker Conference IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015. Abstract | BibTeX | Links: [PDF] @conference{IROS2015, title = {Hidden markov modeling of human pathological gait using laser range finder for an assisted living intelligent robotic walker}, author = {X S Papageorgiou and G Chalvatzaki and C S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/IROS2015.pdf}, doi = {10.1109/IROS.2015.7354283}, year = {2015}, date = {2015-09-01}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages = {6342-6347}, abstract = {The precise analysis of a patient's or an elderly person's walking pattern is very important for an effective intelligent active mobility assistance robot. This walking pattern can be described by a cyclic motion, which can be modeled using the consecutive gait phases. In this paper, we present a completely non-invasive framework for analyzing and recognizing a pathological human walking gait pattern. Our framework utilizes a laser range finder sensor to detect and track the human legs, and an appropriately synthesized Hidden Markov Model (HMM) for state estimation, and recognition of the gait patterns. We demonstrate the applicability of this setup using real data, collected from an ensemble of different elderly persons with a number of pathologies. The results presented in this paper demonstrate that the proposed human data analysis scheme has the potential to provide the necessary methodological (modeling, inference, and learning) framework for a cognitive behavior-based robot control system. More specifically, the proposed framework has the potential to be used for the classification of specific walking pathologies, which is needed for the development of a context-aware robot mobility assistant.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } The precise analysis of a patient's or an elderly person's walking pattern is very important for an effective intelligent active mobility assistance robot. This walking pattern can be described by a cyclic motion, which can be modeled using the consecutive gait phases. In this paper, we present a completely non-invasive framework for analyzing and recognizing a pathological human walking gait pattern. Our framework utilizes a laser range finder sensor to detect and track the human legs, and an appropriately synthesized Hidden Markov Model (HMM) for state estimation, and recognition of the gait patterns. We demonstrate the applicability of this setup using real data, collected from an ensemble of different elderly persons with a number of pathologies. The results presented in this paper demonstrate that the proposed human data analysis scheme has the potential to provide the necessary methodological (modeling, inference, and learning) framework for a cognitive behavior-based robot control system. More specifically, the proposed framework has the potential to be used for the classification of specific walking pathologies, which is needed for the development of a context-aware robot mobility assistant. |
CS Tzafestas, XS Papageorgiou, GP Moustris, G Chalvatzaki, A Dometios User-Oriented Human-Robot Interaction for an Intelligent Walking Assistant Robotic Device Conference Workshop IEEE/RSJ Int'l Conf. on Intelligent Robots and Systems, Invited Session: "Cognitive Mobility Assistance Robots: Scientific Advances and Perspectives", Hamburg, Germany, Sept. 28 - Oct. 02, 2015, 2015. @conference{Tzafestas2015, title = {User-Oriented Human-Robot Interaction for an Intelligent Walking Assistant Robotic Device}, author = {CS Tzafestas and XS Papageorgiou and GP Moustris and G Chalvatzaki and A Dometios}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/IROS2015-Workshop-Proceedings_Cognitive-Mobility-Assistance_final.pdf}, year = {2015}, date = {2015-09-01}, booktitle = {Workshop IEEE/RSJ Int'l Conf. on Intelligent Robots and Systems, Invited Session: "Cognitive Mobility Assistance Robots: Scientific Advances and Perspectives", Hamburg, Germany, Sept. 28 - Oct. 02, 2015}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2014 |
Sheraz Khan, Athanasios Dometios, Chris Verginis, Costas Tzafestas, Dirk Wollherr, Martin Buss RMAP: A rectangular cuboid approximation framework for 3D environment mapping Journal Article Autonomous Robots, 37 (3), pp. 261–277, 2014, ISSN: 09295593. Abstract | BibTeX | Links: [PDF] @article{23n, title = {RMAP: A rectangular cuboid approximation framework for 3D environment mapping}, author = {Sheraz Khan and Athanasios Dometios and Chris Verginis and Costas Tzafestas and Dirk Wollherr and Martin Buss}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/s10514-014-9387-y.pdf}, doi = {10.1007/s10514-014-9387-y}, issn = {09295593}, year = {2014}, date = {2014-02-01}, journal = {Autonomous Robots}, volume = {37}, number = {3}, pages = {261--277}, abstract = {This paper presents a rectangular cuboid approximation framework (RMAP) for 3D mapping. The goal of RMAP is to provide computational and memory efficient environment representations for 3D robotic mapping using axis aligned rectangular cuboids (RC). This paper focuses on two aspects of the RMAP framework: (i) An occupancy grid approach and (ii) A RC approximation of 3D environments based on point cloud density. The RMAP occupancy grid is based on the Rtree data structure which is composed of a hierarchy of RC. The proposed approach is capable of generating probabilistic 3D representations with multiresolution capabilities. It reduces the memory complexity in large scale 3D occupancy grids by avoiding explicit modelling of free space. In contrast to point cloud and fixed resolution cell representations based on beam end point observations, an approximation approach using point cloud density is presented. The proposed approach generates variable sized RC approximations that are memory efficient for axis aligned surfaces. Evaluation of the RMAP occupancy grid and approximation approach based on computational and memory complexity on different datasets shows the effectiveness of this framework for 3D mapping. textcopyright 2014 The Author(s).}, keywords = {}, pubstate = {published}, tppubtype = {article} } This paper presents a rectangular cuboid approximation framework (RMAP) for 3D mapping. The goal of RMAP is to provide computational and memory efficient environment representations for 3D robotic mapping using axis aligned rectangular cuboids (RC). This paper focuses on two aspects of the RMAP framework: (i) An occupancy grid approach and (ii) A RC approximation of 3D environments based on point cloud density. The RMAP occupancy grid is based on the Rtree data structure which is composed of a hierarchy of RC. The proposed approach is capable of generating probabilistic 3D representations with multiresolution capabilities. It reduces the memory complexity in large scale 3D occupancy grids by avoiding explicit modelling of free space. In contrast to point cloud and fixed resolution cell representations based on beam end point observations, an approximation approach using point cloud density is presented. The proposed approach generates variable sized RC approximations that are memory efficient for axis aligned surfaces. Evaluation of the RMAP occupancy grid and approximation approach based on computational and memory complexity on different datasets shows the effectiveness of this framework for 3D mapping. textcopyright 2014 The Author(s). |
S Khan, A Dometios, C Verginis, C Tzafestas, D Wollherr, M Buss RMAP: a Rectangular Cuboid Approximation Framework for 3D Environment Mapping Journal Article 37 (3), pp. 261–277, 2014, ISSN: 1573-7527. Abstract | BibTeX | Links: [PDF] @article{KDVTWB14, title = {RMAP: a Rectangular Cuboid Approximation Framework for 3D Environment Mapping}, author = {S Khan and A Dometios and C Verginis and C Tzafestas and D Wollherr and M Buss}, url = {http://robotics.ntua.gr/wp-content/publications/Khan14_RMAP_Rectangular_Cuboid_Approxim.pdf}, doi = {10.1007/s10514-014-9387-y}, issn = {1573-7527}, year = {2014}, date = {2014-01-01}, volume = {37}, number = {3}, pages = {261--277}, publisher = {Springer}, abstract = {This paper presents a rectangular cuboid approximation framework (RMAP) for 3D mapping. The goal of RMAP is to provide computational and memory efficient environment representations for 3D robotic mapping using axis aligned rectangular cuboids (RC). This paper focuses on two aspects of the RMAP framework: (i) An occupancy grid approach and (ii) A RC approximation of 3D environments based on point cloud density. The RMAP occupancy grid is based on the Rtree data structure which is composed of a hierarchy of RC. The proposed approach is capable of generating probabilistic 3D representations with multiresolution capabilities. It reduces the memory complexity in large scale 3D occupancy grids by avoiding explicit modelling of free space. In contrast to point cloud and fixed resolution cell representations based on beam end point observations, an approximation approach using point cloud density is presented. The proposed approach generates variable sized RC approximations that are memory efficient for axis aligned surfaces. Evaluation of the RMAP occupancy grid and approximation approach based on computational and memory complexity on different datasets shows the effectiveness of this framework for 3D mapping.}, keywords = {}, pubstate = {published}, tppubtype = {article} } This paper presents a rectangular cuboid approximation framework (RMAP) for 3D mapping. The goal of RMAP is to provide computational and memory efficient environment representations for 3D robotic mapping using axis aligned rectangular cuboids (RC). This paper focuses on two aspects of the RMAP framework: (i) An occupancy grid approach and (ii) A RC approximation of 3D environments based on point cloud density. The RMAP occupancy grid is based on the Rtree data structure which is composed of a hierarchy of RC. The proposed approach is capable of generating probabilistic 3D representations with multiresolution capabilities. It reduces the memory complexity in large scale 3D occupancy grids by avoiding explicit modelling of free space. In contrast to point cloud and fixed resolution cell representations based on beam end point observations, an approximation approach using point cloud density is presented. The proposed approach generates variable sized RC approximations that are memory efficient for axis aligned surfaces. Evaluation of the RMAP occupancy grid and approximation approach based on computational and memory complexity on different datasets shows the effectiveness of this framework for 3D mapping. |
X S Papageorgiou, G Chalvatzaki, C S Tzafestas, P Maragos Hidden Markov modeling of human normal gait using laser range finder for a mobility assistance robot Conference IEEE International Conference on Robotics and Automation (ICRA), 2014, ISSN: 1050-4729. Abstract | BibTeX | Links: [PDF] @conference{ICRA2014, title = {Hidden Markov modeling of human normal gait using laser range finder for a mobility assistance robot}, author = {X S Papageorgiou and G Chalvatzaki and C S Tzafestas and P Maragos}, url = {http://robotics.ntua.gr/wp-content/publications/ICRA2014.pdf}, doi = {10.1109/ICRA.2014.6906899}, issn = {1050-4729}, year = {2014}, date = {2014-05-01}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA)}, pages = {482-487}, abstract = {For an effective intelligent active mobility assistance robot, the walking pattern of a patient or an elderly person has to be analyzed precisely. A well-known fact is that the walking patterns are gaits, that is, cyclic patterns with several consecutive phases. These cyclic motions can be modeled using the consecutive gait phases. In this paper, we present a completely non-invasive framework for analyzing a normal human walking gait pattern. Our framework utilizes a laser range finder sensor to collect the data, a combination of filters to preprocess these data, and an appropriately synthesized Hidden Markov Model (HMM) for state estimation, and recognition of the gait data. We demonstrate the applicability of this setup using real data, collected from an ensemble of different persons. The results presented in this paper demonstrate that the proposed human data analysis scheme has the potential to provide the necessary methodological (modeling, inference, and learning) framework for a cognitive behavior-based robot control system. More specifically, the proposed framework has the potential to be used for the recognition of abnormal gait patterns and the subsequent classification of specific walking pathologies, which is needed for the development of a context-aware robot mobility assistant.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } For an effective intelligent active mobility assistance robot, the walking pattern of a patient or an elderly person has to be analyzed precisely. A well-known fact is that the walking patterns are gaits, that is, cyclic patterns with several consecutive phases. These cyclic motions can be modeled using the consecutive gait phases. In this paper, we present a completely non-invasive framework for analyzing a normal human walking gait pattern. Our framework utilizes a laser range finder sensor to collect the data, a combination of filters to preprocess these data, and an appropriately synthesized Hidden Markov Model (HMM) for state estimation, and recognition of the gait data. We demonstrate the applicability of this setup using real data, collected from an ensemble of different persons. The results presented in this paper demonstrate that the proposed human data analysis scheme has the potential to provide the necessary methodological (modeling, inference, and learning) framework for a cognitive behavior-based robot control system. More specifically, the proposed framework has the potential to be used for the recognition of abnormal gait patterns and the subsequent classification of specific walking pathologies, which is needed for the development of a context-aware robot mobility assistant. |
X S Papageorgiou, C S Tzafestas, P Maragos, G Pavlakos, G Chalvatzaki, G Moustris, I Kokkinos, A Peer, B Stanczyk, E -S Fotinea, E Efthimiou Advances in Intelligent Mobility Assistance Robot Integrating Multimodal Sensory Processing Conference J_HCII, Springer International Publishing, Cham, 2014, ISBN: 978-3-319-07446-7. Abstract | BibTeX | Links: [PDF] @conference{HCII2014, title = {Advances in Intelligent Mobility Assistance Robot Integrating Multimodal Sensory Processing}, author = {X S Papageorgiou and C S Tzafestas and P Maragos and G Pavlakos and G Chalvatzaki and G Moustris and I Kokkinos and A Peer and B Stanczyk and E -S Fotinea and E Efthimiou}, editor = {C Stephanidis and M Antona}, url = {http://robotics.ntua.gr/wp-content/publications/HCII2014.pdf}, doi = {https://doi.org/10.1007/978-3-319-07446-7_66}, isbn = {978-3-319-07446-7}, year = {2014}, date = {2014-01-01}, booktitle = {J_HCII}, pages = {692--703}, publisher = {Springer International Publishing}, address = {Cham}, abstract = {Mobility disabilities are prevalent in our ageing society and impede activities important for the independent living of elderly people and their quality of life. The goal of this work is to support human mobility and thus enforce fitness and vitality by developing intelligent robotic platforms designed to provide user-centred and natural support for ambulating in indoor environments. We envision the design of cognitive mobile robotic systems that can monitor and understand specific forms of human activity, in order to deduce what the human needs are, in terms of mobility. The goal is to provide user and context adaptive active support and ambulation assistance to elderly users, and generally to individuals with specific forms of moderate to mild walking impairment.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Mobility disabilities are prevalent in our ageing society and impede activities important for the independent living of elderly people and their quality of life. The goal of this work is to support human mobility and thus enforce fitness and vitality by developing intelligent robotic platforms designed to provide user-centred and natural support for ambulating in indoor environments. We envision the design of cognitive mobile robotic systems that can monitor and understand specific forms of human activity, in order to deduce what the human needs are, in terms of mobility. The goal is to provide user and context adaptive active support and ambulation assistance to elderly users, and generally to individuals with specific forms of moderate to mild walking impairment. |
2013 |
Costas S Tzafestas, Spyros Velanas Telehaptic perception of delayed stiffness using adaptive impedance control: Experimental psychophysical analysis Journal Article Presence: Teleoperators and Virtual Environments, 22 (4), pp. 323–344, 2013, ISSN: 15313263. Abstract | BibTeX | Links: [PDF] @article{Tzafestas2013, title = {Telehaptic perception of delayed stiffness using adaptive impedance control: Experimental psychophysical analysis}, author = {Costas S Tzafestas and Spyros Velanas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/tzafestas2013.pdf}, doi = {10.1162/PRES_a_00162}, issn = {15313263}, year = {2013}, date = {2013-01-01}, journal = {Presence: Teleoperators and Virtual Environments}, volume = {22}, number = {4}, pages = {323--344}, abstract = {Abstract Telehaptics is the science of transmitting touch-related sensations over computer networks. With respect to robot teleoperation, telehaptics emphasizes more on reliably reproducing physical properties of a remote environment, as mediated over a network through the use of appropriate haptic interfacing technologies. One of the main factors that can cause degradation of the quality of a telehaptic system is the presence of time delays. Inspired by concepts such as impedance-reflection and model-mediated telemanipulation, an adaptive impedance control scheme has been proposed aiming to mitigate some of the problems caused by network delays in a telehaptic system. This paper presents an experimental analysis, which has been conducted to assess the actual performance of the proposed telehaptic scheme in terms of both control and human perception objectives. Firstly, a set of comparative numerical experiments is presented aiming to analyze stability and characterize transparency of the telehaptic system under large time delays. The results show the superior performance of the proposed adaptive impedance scheme as compared to direct force-reflecting teleoperation. Then, a series of psychophysical experiments is described, to evaluate the performance of the telehaptic system with respect to human perception of remote (delayed) stiffness. An analysis of the obtained results shows that the proposed adaptive scheme significantly improves telehaptic perception of linear stiffness in the presence of network delays, maintaining perceptual thresholds close to the ones obtained in the case of direct, nondelayed stimuli. A comparative experimental evaluation of psychometric transparency confirms the superior robustness with regard to time delay of the adaptive impedance telehaptic scheme as compared to state-of-the-art position/force transparentizing methods.}, keywords = {}, pubstate = {published}, tppubtype = {article} } Abstract Telehaptics is the science of transmitting touch-related sensations over computer networks. With respect to robot teleoperation, telehaptics emphasizes more on reliably reproducing physical properties of a remote environment, as mediated over a network through the use of appropriate haptic interfacing technologies. One of the main factors that can cause degradation of the quality of a telehaptic system is the presence of time delays. Inspired by concepts such as impedance-reflection and model-mediated telemanipulation, an adaptive impedance control scheme has been proposed aiming to mitigate some of the problems caused by network delays in a telehaptic system. This paper presents an experimental analysis, which has been conducted to assess the actual performance of the proposed telehaptic scheme in terms of both control and human perception objectives. Firstly, a set of comparative numerical experiments is presented aiming to analyze stability and characterize transparency of the telehaptic system under large time delays. The results show the superior performance of the proposed adaptive impedance scheme as compared to direct force-reflecting teleoperation. Then, a series of psychophysical experiments is described, to evaluate the performance of the telehaptic system with respect to human perception of remote (delayed) stiffness. An analysis of the obtained results shows that the proposed adaptive scheme significantly improves telehaptic perception of linear stiffness in the presence of network delays, maintaining perceptual thresholds close to the ones obtained in the case of direct, nondelayed stimuli. A comparative experimental evaluation of psychometric transparency confirms the superior robustness with regard to time delay of the adaptive impedance telehaptic scheme as compared to state-of-the-art position/force transparentizing methods. |
G.P. Moustris, A.I. Mantelos, C.S. Tzafestas Active motion compensation in robotic cardiac surgery Conference 2013 European Control Conference, ECC 2013, 2013, ISBN: 9783033039629. Abstract | BibTeX | Links: [PDF] @conference{Moustris2013b, title = {Active motion compensation in robotic cardiac surgery}, author = { G.P. Moustris and A.I. Mantelos and C.S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Active_motion_compensation_in_robotic_cardiac_surgery.pdf}, isbn = {9783033039629}, year = {2013}, date = {2013-06-01}, booktitle = {2013 European Control Conference, ECC 2013}, abstract = {Motion compensation is a prominent application in robotic beating heart surgery, with significant potential benefits for both surgeons and patients. In this paper we investigate an activate assistance control scheme on a simple tracking task, which helps the surgeon guide the robot on a predefined reference. The control is implemented on top of a shared control system, which serves as a basis for implementing higher level controllers. Experiments with a trained surgeon are also presented, which show the positive effect of the approach. textcopyright 2013 EUCA.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Motion compensation is a prominent application in robotic beating heart surgery, with significant potential benefits for both surgeons and patients. In this paper we investigate an activate assistance control scheme on a simple tracking task, which helps the surgeon guide the robot on a predefined reference. The control is implemented on top of a shared control system, which serves as a basis for implementing higher level controllers. Experiments with a trained surgeon are also presented, which show the positive effect of the approach. textcopyright 2013 EUCA. |
G. P. Moustris, A. I. Mantelos, C. S. Tzafestas Enhancing surgical accuracy using virtual fixtures and motion compensation in robotic beating heart surgery Conference 2013 21st Mediterranean Conference on Control and Automation, MED 2013 - Conference Proceedings, 2013, ISSN: 1050-4729. Abstract | BibTeX | Links: [PDF] @conference{Moustris2013, title = {Enhancing surgical accuracy using virtual fixtures and motion compensation in robotic beating heart surgery}, author = { G. P. Moustris and A. I. Mantelos and C. S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Enhancing_surgical_accuracy_using_virtual_fixtures_and_motion_compensation_in_robotic_beating_heart_surgery.pdf}, doi = {10.1109/MED.2013.6608880}, issn = {1050-4729}, year = {2013}, date = {2013-06-01}, booktitle = {2013 21st Mediterranean Conference on Control and Automation, MED 2013 - Conference Proceedings}, pages = {1254--1260}, abstract = {This paper proposes a novel technique for applying virtual fixtures in a changing environment. The main targeted application is robotic beating heart surgery, which enables the surgeon to operate directly on a beating heart. Using a motion compensation framework, the motion of the heart surface is stabilized in a virtual space, which is presented to the surgeon to operate in. Consequently, the fixture is implemented in this static space, bypassing problems of dynamic fixtures such as position update, placement and force transients. Randomized experiments were performed using a trained surgeon comparing our approach to simple motion compensation and no compensation at all. The positive effect of the fixture in surgical accuracy for a tracking task is also discussed. textcopyright 2013 IEEE.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } This paper proposes a novel technique for applying virtual fixtures in a changing environment. The main targeted application is robotic beating heart surgery, which enables the surgeon to operate directly on a beating heart. Using a motion compensation framework, the motion of the heart surface is stabilized in a virtual space, which is presented to the surgeon to operate in. Consequently, the fixture is implemented in this static space, bypassing problems of dynamic fixtures such as position update, placement and force transients. Randomized experiments were performed using a trained surgeon comparing our approach to simple motion compensation and no compensation at all. The positive effect of the fixture in surgical accuracy for a tracking task is also discussed. textcopyright 2013 IEEE. |
2012 |
Sheraz Khan, Nikos Mitsou, Dirk Wollherr, Costas Tzafestas An optimization approach for 3D environment mapping using normal vector uncertainty Conference 2012 12th International Conference on Control Automation Robotics & Vision (ICARCV), 2012 (December), 2012, ISBN: 978-1-4673-1872-3. Abstract | BibTeX | Links: [Webpage] [PDF] @conference{Khan2012, title = {An optimization approach for 3D environment mapping using normal vector uncertainty}, author = { Sheraz Khan and Nikos Mitsou and Dirk Wollherr and Costas Tzafestas}, url = {http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=6485267 http://robotics.ntua.gr/wp-content/uploads/sites/2/khan2012.pdf}, doi = {10.1109/ICARCV.2012.6485267}, isbn = {978-1-4673-1872-3}, year = {2012}, date = {2012-12-01}, booktitle = {2012 12th International Conference on Control Automation Robotics & Vision (ICARCV)}, volume = {2012}, number = {December}, pages = {841--846}, abstract = {In this paper a novel approach for 3D environment mapping using registered robot poses is presented. The proposed algorithm focuses on improving the quality of robot generated 3D maps by incorporating the uncertainty of 3D points and propagating it into the normal vectors of surfaces. The uncertainty of normal vectors is an indicator of the quality of the detected surface. A controlled random search algorithm is applied to optimize a non-convex function of uncertain normal vectors and number of clusters in order to find the optimal threshold parameter for the segmentation process. This approach leads to an improved cluster coherence and thus better maps.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } In this paper a novel approach for 3D environment mapping using registered robot poses is presented. The proposed algorithm focuses on improving the quality of robot generated 3D maps by incorporating the uncertainty of 3D points and propagating it into the normal vectors of surfaces. The uncertainty of normal vectors is an indicator of the quality of the detected surface. A controlled random search algorithm is applied to optimize a non-convex function of uncertain normal vectors and number of clusters in order to find the optimal threshold parameter for the segmentation process. This approach leads to an improved cluster coherence and thus better maps. |
Spyros V. Velanas, Costas S. Tzafestas Model-mediated telehaptic perception of delayed curvature Conference Proceedings - IEEE International Workshop on Robot and Human Interactive Communication, 2012, ISBN: 9781467346054. Abstract | BibTeX | Links: [PDF] @conference{Velanas2012, title = {Model-mediated telehaptic perception of delayed curvature}, author = { Spyros V. Velanas and Costas S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/velanas2012.pdf}, doi = {10.1109/ROMAN.2012.6343871}, isbn = {9781467346054}, year = {2012}, date = {2012-09-01}, booktitle = {Proceedings - IEEE International Workshop on Robot and Human Interactive Communication}, pages = {941--947}, abstract = {This paper proposes a model-mediated telemanipulation scheme, focusing on the kinaesthetic perception of specific geometric properties of the remote environment in the presence of time delay. The basic idea is inspired from previous work on impedance-reflection teleoperation, which is here extended to incorporate the construction of a two-dimensional local geometric model. This model incorporates the local curvature of the remote environment, estimated online using a recursive least squares (RLS) method, which is then used to reconstruct a virtual surface model at the master site for haptic display. A series of experiments has been conducted, where each subject manipulated the haptic master to kinaes-thetically explore the surface of a remote (virtual) environment. The analysis of the obtained experimental results, in terms of telehaptic discrimination of curvature, shows the effectiveness of the proposed model-mediated scheme at mitigating some of the adverse effects of time delay in the communication loop. textcopyright 2012 IEEE.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } This paper proposes a model-mediated telemanipulation scheme, focusing on the kinaesthetic perception of specific geometric properties of the remote environment in the presence of time delay. The basic idea is inspired from previous work on impedance-reflection teleoperation, which is here extended to incorporate the construction of a two-dimensional local geometric model. This model incorporates the local curvature of the remote environment, estimated online using a recursive least squares (RLS) method, which is then used to reconstruct a virtual surface model at the master site for haptic display. A series of experiments has been conducted, where each subject manipulated the haptic master to kinaes-thetically explore the surface of a remote (virtual) environment. The analysis of the obtained experimental results, in terms of telehaptic discrimination of curvature, shows the effectiveness of the proposed model-mediated scheme at mitigating some of the adverse effects of time delay in the communication loop. textcopyright 2012 IEEE. |
John N. Karigiannis, Costas S. Tzafestas Robustness and generalization of model-free learning for robot kinematic control using a nested-hierarchical multi-agent topology Conference Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, 2012, ISSN: 21551774. Abstract | BibTeX | Links: [PDF] @conference{Karigiannis2012, title = {Robustness and generalization of model-free learning for robot kinematic control using a nested-hierarchical multi-agent topology}, author = { John N. Karigiannis and Costas S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/karigiannis2012.pdf}, doi = {10.1109/BioRob.2012.6290276}, issn = {21551774}, year = {2012}, date = {2012-06-01}, booktitle = {Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics}, pages = {1140--1147}, abstract = {This paper focuses on evaluating the robustness and knowledge generalization properties of a model-free learning mechanism, applied for the kinematic control of robot manipulation chains based on a nested-hierarchical multi-agent architecture. In the proposed topology, the agents correspond to independent degrees-of-freedom (DOF) of the system, managing to gain experience over the task that they collaboratively perform by continuously exploring and exploiting their state-to-action mapping space. Each agent forms a local (partial) view of the global system state and task progress, through a recursive learning process. By organizing the agents in a nested topology, the goal is to facilitate modular scaling to more complex kinematic topologies, with loose control coupling among the agents. Reinforcement learning is applied within each agent, to evolve a local state-to-action mapping in a continuous domain, thus leading to a system that exhibits developmental properties. This work addresses problem settings in the domain of kinematic control of dexterous-redundant robot manipulation systems. The numerical experiments performed consider the case of a single-linkage open kinematic chain, presenting kinematic redundancies given the desired task-goal. The focal issue in these experiments is to assess the capacity of the proposed multi-agent system to progressively and autonomously acquire cooperative sensorimotor skills through a self-learning process, that is, without the use of any explicit model-based planning strategy. In this paper, generalization and robustness properties of the overall multi-agent system are explored. Furthermore, the proposed framework is evaluated in constrained motion tasks, both in static and non-static environments. The computational cost of the proposed multi-agent architecture is also assessed.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } This paper focuses on evaluating the robustness and knowledge generalization properties of a model-free learning mechanism, applied for the kinematic control of robot manipulation chains based on a nested-hierarchical multi-agent architecture. In the proposed topology, the agents correspond to independent degrees-of-freedom (DOF) of the system, managing to gain experience over the task that they collaboratively perform by continuously exploring and exploiting their state-to-action mapping space. Each agent forms a local (partial) view of the global system state and task progress, through a recursive learning process. By organizing the agents in a nested topology, the goal is to facilitate modular scaling to more complex kinematic topologies, with loose control coupling among the agents. Reinforcement learning is applied within each agent, to evolve a local state-to-action mapping in a continuous domain, thus leading to a system that exhibits developmental properties. This work addresses problem settings in the domain of kinematic control of dexterous-redundant robot manipulation systems. The numerical experiments performed consider the case of a single-linkage open kinematic chain, presenting kinematic redundancies given the desired task-goal. The focal issue in these experiments is to assess the capacity of the proposed multi-agent system to progressively and autonomously acquire cooperative sensorimotor skills through a self-learning process, that is, without the use of any explicit model-based planning strategy. In this paper, generalization and robustness properties of the overall multi-agent system are explored. Furthermore, the proposed framework is evaluated in constrained motion tasks, both in static and non-static environments. The computational cost of the proposed multi-agent architecture is also assessed. |
Nikos Mitsou, Roderick de Nijs, David Lenz, Johannes Frimberger, Dirk Wollherr, Kolja Kühnlenz, Costas Tzafestas Gesture and Sign Language in Human-Computer Interaction and Embodied Communication Conference Spatial Cognition VIII, 7206 , 2012, ISSN: 03029743. Abstract | BibTeX | Links: [Webpage] @conference{31b, title = {Gesture and Sign Language in Human-Computer Interaction and Embodied Communication}, author = { Nikos Mitsou and Roderick de Nijs and David Lenz and Johannes Frimberger and Dirk Wollherr and Kolja Kühnlenz and Costas Tzafestas}, url = {http://link.springer.com/10.1007/978-3-642-34182-3}, doi = {10.1007/978-3-642-34182-3}, issn = {03029743}, year = {2012}, date = {2012-01-01}, booktitle = {Spatial Cognition VIII}, volume = {7206}, pages = {54--73}, abstract = {We extend and develop an existing virtual agent system to generate communicative gestures for different embodiments (i.e. virtual or physical agents). This paper presents our ongoing work on an implementation of this system for the NAO humanoid robot. From a specification of multi-modal behaviors encoded with the behavior markup language, BML, the system synchronizes and realizes the verbal and nonverbal behaviors on the robot.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } We extend and develop an existing virtual agent system to generate communicative gestures for different embodiments (i.e. virtual or physical agents). This paper presents our ongoing work on an implementation of this system for the NAO humanoid robot. From a specification of multi-modal behaviors encoded with the behavior markup language, BML, the system synchronizes and realizes the verbal and nonverbal behaviors on the robot. |
2011 |
Nikos Mitsou, Irene Ntoutsi, Dirk Wollherr, Costas Tzafestas, Hans Peter Kriegel Revealing cluster formation over huge volatile robotic data Conference Proceedings - IEEE International Conference on Data Mining, ICDM, 2011, ISSN: 15504786. Abstract | BibTeX | Links: [PDF] @conference{Mitsou2011, title = {Revealing cluster formation over huge volatile robotic data}, author = { Nikos Mitsou and Irene Ntoutsi and Dirk Wollherr and Costas Tzafestas and Hans Peter Kriegel}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/mitsou2011.pdf}, doi = {10.1109/ICDMW.2011.147}, issn = {15504786}, year = {2011}, date = {2011-12-01}, booktitle = {Proceedings - IEEE International Conference on Data Mining, ICDM}, pages = {450--457}, abstract = {In this paper, we propose a driven by the robotics field method for revealing global clusters over a fast, huge and volatile stream of robotic data. The stream comes from a mobile robot which autonomously navigates in an unknown environment perceiving it through its sensors. The sensor data arrives fast, is huge and evolves quickly over time as the robot explores the environment and observes new objects or new parts of already observed objects. To deal with the nature of data, we propose a grid-based algorithm that updates the grid structure and adjusts the so far built clusters online. Our method is capable of detecting object formations over time based on the partial observations of the robot at each time point. Experiments on real data verify the usefulness and efficiency of our method.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } In this paper, we propose a driven by the robotics field method for revealing global clusters over a fast, huge and volatile stream of robotic data. The stream comes from a mobile robot which autonomously navigates in an unknown environment perceiving it through its sensors. The sensor data arrives fast, is huge and evolves quickly over time as the robot explores the environment and observes new objects or new parts of already observed objects. To deal with the nature of data, we propose a grid-based algorithm that updates the grid structure and adjusts the so far built clusters online. Our method is capable of detecting object formations over time based on the partial observations of the robot at each time point. Experiments on real data verify the usefulness and efficiency of our method. |
2010 |
John N. Karigiannis, Theodoros I. Rekatsinas, Costas S. Tzafestas Fuzzy rule based neuro-dynamic programming for mobile robot skill acquisition on the basis of a nested multi-agent architecture Conference 2010 IEEE International Conference on Robotics and Biomimetics, ROBIO 2010, 2010, ISBN: 9781424493173. Abstract | BibTeX | Links: [PDF] @conference{Karigiannis2010, title = {Fuzzy rule based neuro-dynamic programming for mobile robot skill acquisition on the basis of a nested multi-agent architecture}, author = { John N. Karigiannis and Theodoros I. Rekatsinas and Costas S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/karigiannis2010.pdf}, doi = {10.1109/ROBIO.2010.5723346}, isbn = {9781424493173}, year = {2010}, date = {2010-12-01}, booktitle = {2010 IEEE International Conference on Robotics and Biomimetics, ROBIO 2010}, pages = {312--319}, abstract = {Biologically inspired architectures that mimic the organizational structure of living organisms and in general frameworks that will improve the design of intelligent robots attract significant attention from the research community. Self-organization problems, intrinsic behaviors as well as effective learning and skill transfer processes in the context of robotic systems have been significantly investigated by researchers. Our work presents a new framework of developmental skill learning process by introducing a hierarchical nested multi-agent architecture. A neuro-dynamic learning mechanism employing function approximators in a fuzzified state-space is utilized, leading to a collaborative control scheme among the distributed agents engaged in a continuous space, which enables the multi-agent system to learn, over a period of time, how to perform sequences of continuous actions in a cooperative manner without any prior task model. The agents comprising the system manage to gain experience over the task that they collaboratively perform by continuously exploring and exploiting their state-to-action mapping space. For the specific problem setting, the proposed theoretical framework is employed in the case of two simulated e-Puck robots performing a collaborative box-pushing task. This task involves active cooperation between the robots in order to jointly push an object on a plane to a specified goal location. We should note that 1) there are no contact points specified for the two e-Pucks and 2) the shape of the object is indifferent. The actuated wheels of the mobile robots are considered as the independent agents that have to build up cooperative skills over time, in order for the robot to demonstrate intelligent behavior. Our goal in this experimental study is to evaluate both the proposed hierarchical multi-agent architecture, as well as the methodological control framework. Such a hierarchical multi-agent approach is envisioned to be highly scalable for the control of complex biologically inspired robot locomotion systems.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Biologically inspired architectures that mimic the organizational structure of living organisms and in general frameworks that will improve the design of intelligent robots attract significant attention from the research community. Self-organization problems, intrinsic behaviors as well as effective learning and skill transfer processes in the context of robotic systems have been significantly investigated by researchers. Our work presents a new framework of developmental skill learning process by introducing a hierarchical nested multi-agent architecture. A neuro-dynamic learning mechanism employing function approximators in a fuzzified state-space is utilized, leading to a collaborative control scheme among the distributed agents engaged in a continuous space, which enables the multi-agent system to learn, over a period of time, how to perform sequences of continuous actions in a cooperative manner without any prior task model. The agents comprising the system manage to gain experience over the task that they collaboratively perform by continuously exploring and exploiting their state-to-action mapping space. For the specific problem setting, the proposed theoretical framework is employed in the case of two simulated e-Puck robots performing a collaborative box-pushing task. This task involves active cooperation between the robots in order to jointly push an object on a plane to a specified goal location. We should note that 1) there are no contact points specified for the two e-Pucks and 2) the shape of the object is indifferent. The actuated wheels of the mobile robots are considered as the independent agents that have to build up cooperative skills over time, in order for the robot to demonstrate intelligent behavior. Our goal in this experimental study is to evaluate both the proposed hierarchical multi-agent architecture, as well as the methodological control framework. Such a hierarchical multi-agent approach is envisioned to be highly scalable for the control of complex biologically inspired robot locomotion systems. |
Spyros V Velanas, Costas S Tzafestas Human Telehaptic Perception of Stiffness using an Adaptive Impedance Re fl ection Bilateral Teleoperation Control Scheme Conference In: Proceedings of the IEEE International Workshop on Robot and Human Interactive Communication, ROMAN-2010, 2010, ISBN: 9781424479894. @conference{Velanas2010, title = {Human Telehaptic Perception of Stiffness using an Adaptive Impedance Re fl ection Bilateral Teleoperation Control Scheme}, author = { Spyros V Velanas and Costas S Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/velanas2010.pdf}, isbn = {9781424479894}, year = {2010}, date = {2010-09-01}, booktitle = {In: Proceedings of the IEEE International Workshop on Robot and Human Interactive Communication, ROMAN-2010}, pages = {21--26}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
John N Karigiannis, Theodoros I Rekatsinas, Costas S Tzafestas Hierarchical Multi-Agent Architecture employing TD ( $łambda$ ) Learning with Function Approximators for Robot Skill Acquisition Conference Architecture, 2010. @conference{36b, title = {Hierarchical Multi-Agent Architecture employing TD ( $łambda$ ) Learning with Function Approximators for Robot Skill Acquisition}, author = { John N Karigiannis and Theodoros I Rekatsinas and Costas S Tzafestas}, year = {2010}, date = {2010-01-01}, booktitle = {Architecture}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2009 |
C. Tzafestas, N. Mitsou, N. Georgakarakos, O. Diamanti, P. Maragos, S. E. Fotinea, E. Efthimiou Gestural teleoperation of a mobile robot based on visual recognition of sign language static handshapes Conference Proceedings - IEEE International Workshop on Robot and Human Interactive Communication, 2009, ISSN: 19449445. Abstract | BibTeX | Links: [PDF] @conference{Tzafestas2009, title = {Gestural teleoperation of a mobile robot based on visual recognition of sign language static handshapes}, author = { C. Tzafestas and N. Mitsou and N. Georgakarakos and O. Diamanti and P. Maragos and S. E. Fotinea and E. Efthimiou}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/tzafestas2009.pdf}, doi = {10.1109/ROMAN.2009.5326235}, issn = {19449445}, year = {2009}, date = {2009-09-01}, booktitle = {Proceedings - IEEE International Workshop on Robot and Human Interactive Communication}, pages = {1073--1079}, abstract = {This paper presents results achieved in the frames of a national research project (titled ldquoDIANOEMArdquo), where visual analysis and sign recognition techniques have been explored on Greek Sign Language (GSL) data. Besides GSL modelling, the aim was to develop a pilot application for teleoperating a mobile robot using natural hand signs. A small vocabulary of hand signs has been designed to enable desktopbased teleoperation at a high-level of supervisory telerobotic control. Real-time visual recognition of the hand images is performed by training a multi-layer perceptron (MLP) neural network. Various shape descriptors of the segmented hand posture images have been explored as inputs to the MLP network. These include Fourier shape descriptors on the contour of the segmented hand sign images, moments, compactness, eccentricity, and histogram of the curvature. We have examined which of these shape descriptors are best suited for real-time recognition of hand signs, in relation to the number and choice of hand postures, in order to achieve maximum recognition performance. The hand-sign recognizer has been integrated in a graphical user interface, and has been implemented with success on a pilot application for real-time desktop-based gestural teleoperation of a mobile robot vehicle.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } This paper presents results achieved in the frames of a national research project (titled ldquoDIANOEMArdquo), where visual analysis and sign recognition techniques have been explored on Greek Sign Language (GSL) data. Besides GSL modelling, the aim was to develop a pilot application for teleoperating a mobile robot using natural hand signs. A small vocabulary of hand signs has been designed to enable desktopbased teleoperation at a high-level of supervisory telerobotic control. Real-time visual recognition of the hand images is performed by training a multi-layer perceptron (MLP) neural network. Various shape descriptors of the segmented hand posture images have been explored as inputs to the MLP network. These include Fourier shape descriptors on the contour of the segmented hand sign images, moments, compactness, eccentricity, and histogram of the curvature. We have examined which of these shape descriptors are best suited for real-time recognition of hand signs, in relation to the number and choice of hand postures, in order to achieve maximum recognition performance. The hand-sign recognizer has been integrated in a graphical user interface, and has been implemented with success on a pilot application for real-time desktop-based gestural teleoperation of a mobile robot vehicle. |
S.E. Fotinea, Eleni Efthimiou, George Caridakis, Olga Diamanti, N. Mitsou, K. Karpouzis, C. Tzafestas, P. Maragos DIANOEMA: Visual analysis and sign recognition for GSL modelling and robot teleoperation Conference Language and Speech, 2009. BibTeX | Links: [Webpage] [PDF] @conference{Fotinea2009, title = {DIANOEMA: Visual analysis and sign recognition for GSL modelling and robot teleoperation}, author = { S.E. Fotinea and Eleni Efthimiou and George Caridakis and Olga Diamanti and N. Mitsou and K. Karpouzis and C. Tzafestas and P. Maragos}, url = {http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.149.1666&rep=rep1&type=pdf http://robotics.ntua.gr/wp-content/uploads/sites/2/Dianoema_2009.pdf}, year = {2009}, date = {2009-01-01}, booktitle = {Language and Speech}, pages = {2--4}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
M. Alifragis, C.S. Tzafestas Stereo pair matching of archaeological scenes using phase domain methods Conference IMAGAPP 2009 - Proceedings of the 1st International Conference on Computer Imaging Theory and Applications, 2009, ISBN: 9789898111685. Abstract | BibTeX | Links: [PDF] @conference{Alifragis2009, title = {Stereo pair matching of archaeological scenes using phase domain methods}, author = { M. Alifragis and C.S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Alifragis2009.pdf}, isbn = {9789898111685}, year = {2009}, date = {2009-01-01}, booktitle = {IMAGAPP 2009 - Proceedings of the 1st International Conference on Computer Imaging Theory and Applications}, abstract = {This paper conducts an experimental study on the application of some recent theories of image preprocessing and analysis in the frequency domain, particularly the phase congruency and monogenic filtering methods. Our goal was to examine the performance of such methods in a stereo matching problem setting, with photos of complicated scenes. Two objects were used: a scene of an ancient Greek temple of Acropolis and the out-side scene of the gate of an ancient theatre. Due to the complex structure of the photographed object, classic techniques used for feature detection and matching give poor results. The phase-domain approach follovved in this paper is based on the phase-congruency method for feature extraction, together with monogenic filtering and a new correlation measure in the frequency domain for image correspondence and stereo matching. Com-parative results show that the three-dimensional models of the scene computed when applying these phase domain methods are much more detailed and consistent as compared to the models obtained when using clas-sic approaches or the SIFT based techniques, which give poor depth representation and less accurate metric information.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } This paper conducts an experimental study on the application of some recent theories of image preprocessing and analysis in the frequency domain, particularly the phase congruency and monogenic filtering methods. Our goal was to examine the performance of such methods in a stereo matching problem setting, with photos of complicated scenes. Two objects were used: a scene of an ancient Greek temple of Acropolis and the out-side scene of the gate of an ancient theatre. Due to the complex structure of the photographed object, classic techniques used for feature detection and matching give poor results. The phase-domain approach follovved in this paper is based on the phase-congruency method for feature extraction, together with monogenic filtering and a new correlation measure in the frequency domain for image correspondence and stereo matching. Com-parative results show that the three-dimensional models of the scene computed when applying these phase domain methods are much more detailed and consistent as compared to the models obtained when using clas-sic approaches or the SIFT based techniques, which give poor depth representation and less accurate metric information. |
C Tzafestas Telehaptics: issues of control stability and human perception in remote kineasthetic exploration Conference 18th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2009), Workshop on Robot-Human Synergies, Sept. 27 - Oct. 2 2009, 2009. @conference{38b, title = {Telehaptics: issues of control stability and human perception in remote kineasthetic exploration}, author = { C Tzafestas}, year = {2009}, date = {2009-01-01}, booktitle = {18th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2009), Workshop on Robot-Human Synergies, Sept. 27 - Oct. 2 2009}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2008 |
Costas S Tzafestas, Kostas Birbas, Yiannis Koumpouros, Dimitri Christopoulos Pilot Evaluation Study of a Virtual Paracentesis Simulator for Skill Training and Assessment: The Beneficial Effect of Haptic Display Journal Article Presence: Teleoperators & Virtual Environments, 17 (2), pp. 212–229, 2008, ISBN: 10547460. Abstract | BibTeX | Links: [Webpage] [PDF] @article{Tzafestas2008, title = {Pilot Evaluation Study of a Virtual Paracentesis Simulator for Skill Training and Assessment: The Beneficial Effect of Haptic Display}, author = {Costas S Tzafestas and Kostas Birbas and Yiannis Koumpouros and Dimitri Christopoulos}, url = {http://ezproxy.lib.swin.edu.au/login?url=http://search.ebscohost.com/login.aspx?direct=true&db=a9h&AN=31446380&site=ehost-live&scope=site http://robotics.ntua.gr/wp-content/uploads/sites/2/tzafestas2008.pdf}, isbn = {10547460}, year = {2008}, date = {2008-04-01}, journal = {Presence: Teleoperators & Virtual Environments}, volume = {17}, number = {2}, pages = {212--229}, abstract = {Effective, real-time training of health care professionals in invasive procedures is a challenging task. Furthermore, assessing in practice the acquisition of the dexterity and skills required to safely perform such operations is particularly difficult to perform objectively and reliably. The development of virtual reality (VR) simulators offers great potential toward these objectives, and can help bypass some of the difficulties associated with classical surgical training and assessment procedures. In this context, we have developed a prototype VR simulator platform for training in a class of invasive procedures, such as accessing central vessels. This paper focuses more particularly on a pilot study treating the specific application case of subclavian vein paracentesis. The simulation incorporates 3D models of all the human anatomy structures involved in this procedure, where collision detection and response algorithms are implemented to simulate most of the potential complications in accordance with the situations encountered in real clinical practice. Furthermore, haptic display is integrated using a typical force feedback device providing the user with a sense of touch during the simulated operations. Our main objective in this study was to obtain quantitative evaluation results regarding the effect of haptic display on performance. Two user groups participated in the study: (I) novice users and (II) experienced surgeons. The system automatically provides quantitative assessment scores of users' performance, applying a set of objective measures that also involve the optimality of the needle insertion path and indicators of maneuvering errors. Training and skill assessment performance of the system is evaluated in a twofold manner, regarding respectively: (a) the learning curve of novice users, and (b) the correlation of the system-generated scores with the actual surgical experience of the user. These performance indicators are assessed with respect to the activation of the haptic display and to whether this has any beneficial effect (or not). The experimental findings of this first pilot study provide quantitative evidence about the significance of haptic display, not only as a means to enhance the realism of the surgical simulation, but especially as an irreplaceable component for achieving objective and reliable skill assessment. Further larger-scale and long-term clinical studies are needed to validate the effectiveness of such platforms for actual training and dexterity enhancement, particularly when more complex sensorimotor skills are involved. [ABSTRACT FROM AUTHOR] Copyright of Presence: Teleoperators & Virtual Environments is the property of MIT Press and its content may not be copied or emailed to multiple sites or posted to a listserv without the copyright holder's express written permission. However, users may print, download, or email articles for individual use. This abstract may be abridged. No warranty is given about the accuracy of the copy. Users should refer to the original published version of the material for the full abstract. (Copyright applies to all Abstracts.)}, keywords = {}, pubstate = {published}, tppubtype = {article} } Effective, real-time training of health care professionals in invasive procedures is a challenging task. Furthermore, assessing in practice the acquisition of the dexterity and skills required to safely perform such operations is particularly difficult to perform objectively and reliably. The development of virtual reality (VR) simulators offers great potential toward these objectives, and can help bypass some of the difficulties associated with classical surgical training and assessment procedures. In this context, we have developed a prototype VR simulator platform for training in a class of invasive procedures, such as accessing central vessels. This paper focuses more particularly on a pilot study treating the specific application case of subclavian vein paracentesis. The simulation incorporates 3D models of all the human anatomy structures involved in this procedure, where collision detection and response algorithms are implemented to simulate most of the potential complications in accordance with the situations encountered in real clinical practice. Furthermore, haptic display is integrated using a typical force feedback device providing the user with a sense of touch during the simulated operations. Our main objective in this study was to obtain quantitative evaluation results regarding the effect of haptic display on performance. Two user groups participated in the study: (I) novice users and (II) experienced surgeons. The system automatically provides quantitative assessment scores of users' performance, applying a set of objective measures that also involve the optimality of the needle insertion path and indicators of maneuvering errors. Training and skill assessment performance of the system is evaluated in a twofold manner, regarding respectively: (a) the learning curve of novice users, and (b) the correlation of the system-generated scores with the actual surgical experience of the user. These performance indicators are assessed with respect to the activation of the haptic display and to whether this has any beneficial effect (or not). The experimental findings of this first pilot study provide quantitative evidence about the significance of haptic display, not only as a means to enhance the realism of the surgical simulation, but especially as an irreplaceable component for achieving objective and reliable skill assessment. Further larger-scale and long-term clinical studies are needed to validate the effectiveness of such platforms for actual training and dexterity enhancement, particularly when more complex sensorimotor skills are involved. [ABSTRACT FROM AUTHOR] Copyright of Presence: Teleoperators & Virtual Environments is the property of MIT Press and its content may not be copied or emailed to multiple sites or posted to a listserv without the copyright holder's express written permission. However, users may print, download, or email articles for individual use. This abstract may be abridged. No warranty is given about the accuracy of the copy. Users should refer to the original published version of the material for the full abstract. (Copyright applies to all Abstracts.) |
Manthos Alifragis, Andreas Mantelos, Costas S. Tzafestas Web-based remote and virtual programming console of the V+ robotic system Conference IECON Proceedings (Industrial Electronics Conference), 2008, ISSN: 1553-572X. Abstract | BibTeX | Links: [PDF] @conference{Alifragis2008, title = {Web-based remote and virtual programming console of the V+ robotic system}, author = { Manthos Alifragis and Andreas Mantelos and Costas S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/alifragis2008.pdf}, doi = {10.1109/IECON.2008.4758534}, issn = {1553-572X}, year = {2008}, date = {2008-11-01}, booktitle = {IECON Proceedings (Industrial Electronics Conference)}, pages = {3551--3555}, abstract = {The objective of practical training is a major issue in students education, in many engineering disciplines. The access to specialized technological equipment for education is often limited by specific time restriction, or not provided at all. Therefore, the benefits by providing a Web-based platform for remote experimentation via LAN or Internet are evident. This paper describes the development of an e-laboratory platform intending to be used as a distance training system in the field of robotic task planning (e.g. programming of a robotic pick and place task). In prior work, this platform was evaluated by training students remotely to implement robotic tasks, using the robotpsilas Teach Pendant. This paper is focusing on the design of a training platform, aiming to make students familiar with the Vtextlesssuptextgreater+textless/suptextgreater robotic operating system. The proposed platform intends to remotely provide the students with the ability of programming robotic manipulation tasks using directly Vtextlesssuptextgreater+textless/suptextgreater scripts. An evaluation protocol, presented in [11], [12], is considered to be employed in the near future, in order to assess the performance of the proposed e-laboratory platform, with respect to the level of students learning and assimilating of the robotpsilas programming language (Vtextlesssuptextgreater+textless/suptextgreater).}, keywords = {}, pubstate = {published}, tppubtype = {conference} } The objective of practical training is a major issue in students education, in many engineering disciplines. The access to specialized technological equipment for education is often limited by specific time restriction, or not provided at all. Therefore, the benefits by providing a Web-based platform for remote experimentation via LAN or Internet are evident. This paper describes the development of an e-laboratory platform intending to be used as a distance training system in the field of robotic task planning (e.g. programming of a robotic pick and place task). In prior work, this platform was evaluated by training students remotely to implement robotic tasks, using the robotpsilas Teach Pendant. This paper is focusing on the design of a training platform, aiming to make students familiar with the Vtextlesssuptextgreater+textless/suptextgreater robotic operating system. The proposed platform intends to remotely provide the students with the ability of programming robotic manipulation tasks using directly Vtextlesssuptextgreater+textless/suptextgreater scripts. An evaluation protocol, presented in [11], [12], is considered to be employed in the near future, in order to assess the performance of the proposed e-laboratory platform, with respect to the level of students learning and assimilating of the robotpsilas programming language (Vtextlesssuptextgreater+textless/suptextgreater). |
John N. Karigiannis, Costas S. Tzafestas Multi-agent hierarchical architecture modeling kinematic chains employing continuous RL learning with fuzzified state space Conference Proceedings of the 2nd Biennial IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, BioRob 2008, 2008, ISBN: 9781424428830. Abstract | BibTeX | Links: [PDF] @conference{Karigiannis2008, title = {Multi-agent hierarchical architecture modeling kinematic chains employing continuous RL learning with fuzzified state space}, author = { John N. Karigiannis and Costas S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/karigiannis2008.pdf}, doi = {10.1109/BIOROB.2008.4762862}, isbn = {9781424428830}, year = {2008}, date = {2008-10-01}, booktitle = {Proceedings of the 2nd Biennial IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, BioRob 2008}, pages = {716--723}, abstract = {In the context of multi-agent systems, we are proposing a hierarchical robot control architecture that comprises artificial intelligence (AI) techniques and traditional control methodologies, based on the realization of a learning team of agents in a continuous problem setting. In a multiagent system, action selection is important for cooperation and coordination among the agents. By employing reinforcement learning (RL) methods in a fuzzified state-space, we accomplish to design a control architecture and a corresponding methodology, engaged in a continuous space, which enables the agents to learn, over a period of time, to perform sequences of continuous actions in a cooperative manner, in order to reach their goal without any prior generated task model. By organizing the agents in a nested architecture, as proposed in this work, a type of problem-specific recursive knowledge acquisition is attempted. Furthermore, the agents try to exploit the knowledge gathered in order to be in position to execute tasks that indicate certain degree of similarity. The agents correspond in fact to independent degrees of freedom of the system, and achieve to gain experience over the task that they collaboratively perform, by exploring and exploiting their state-to-action mapping space. A numerical experiment is presented in this paper, performed on a simulated planar 4 degrees of freedom (DOF) manipulator, in order to evaluate both the proposed hierarchical multiagent architecture as well as the proposed methodological framework. It is anticipated that such an approach can be highly scalable for the control of robotic systems that are kinematically more complex, comprising multiple DOFs and potentially redundancies in open or closed kinematic chains, particularly dexterous manipulators. textcopyright 2008 IEEE.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } In the context of multi-agent systems, we are proposing a hierarchical robot control architecture that comprises artificial intelligence (AI) techniques and traditional control methodologies, based on the realization of a learning team of agents in a continuous problem setting. In a multiagent system, action selection is important for cooperation and coordination among the agents. By employing reinforcement learning (RL) methods in a fuzzified state-space, we accomplish to design a control architecture and a corresponding methodology, engaged in a continuous space, which enables the agents to learn, over a period of time, to perform sequences of continuous actions in a cooperative manner, in order to reach their goal without any prior generated task model. By organizing the agents in a nested architecture, as proposed in this work, a type of problem-specific recursive knowledge acquisition is attempted. Furthermore, the agents try to exploit the knowledge gathered in order to be in position to execute tasks that indicate certain degree of similarity. The agents correspond in fact to independent degrees of freedom of the system, and achieve to gain experience over the task that they collaboratively perform, by exploring and exploiting their state-to-action mapping space. A numerical experiment is presented in this paper, performed on a simulated planar 4 degrees of freedom (DOF) manipulator, in order to evaluate both the proposed hierarchical multiagent architecture as well as the proposed methodological framework. It is anticipated that such an approach can be highly scalable for the control of robotic systems that are kinematically more complex, comprising multiple DOFs and potentially redundancies in open or closed kinematic chains, particularly dexterous manipulators. textcopyright 2008 IEEE. |
Costas Tzafestas, Spyros Velanas, George Fakiridis Adaptive impedance control in haptic teleoperation to improve transparency under time-delay Conference Proceedings - IEEE International Conference on Robotics and Automation, 2008, ISSN: 10504729. Abstract | BibTeX | Links: [PDF] @conference{Tzafestas2008b, title = {Adaptive impedance control in haptic teleoperation to improve transparency under time-delay}, author = { Costas Tzafestas and Spyros Velanas and George Fakiridis}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/tzafestasVelanas2008.pdf}, doi = {10.1109/ROBOT.2008.4543211}, issn = {10504729}, year = {2008}, date = {2008-05-01}, booktitle = {Proceedings - IEEE International Conference on Robotics and Automation}, pages = {212--219}, abstract = {This paper proposes the application of an adaptive impedance control scheme to alleviate some of the problems associated with the presence of time delays in a haptic teleoperation system. Continuous on-line estimation of the remote environment's impedance is performed, and is then used as a local model for haptic display control. Lyapunov stability of the proposed impedance adaptation law is demonstrated. A series of experiments is performed to evaluate the performance of this teleoperation control scheme. Two performance measures are defined to assess transparency and stability of the teleoperator. Simulation results show the superior performance of the proposed adaptive scheme, with respect to direct teleoperation, particularly in terms of increasing the stability margin and of significantly ameliorating transparency in the presence of large time delays. Experimental results, using a phantom omni as the haptic master device, support this conclusion.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } This paper proposes the application of an adaptive impedance control scheme to alleviate some of the problems associated with the presence of time delays in a haptic teleoperation system. Continuous on-line estimation of the remote environment's impedance is performed, and is then used as a local model for haptic display control. Lyapunov stability of the proposed impedance adaptation law is demonstrated. A series of experiments is performed to evaluate the performance of this teleoperation control scheme. Two performance measures are defined to assess transparency and stability of the teleoperator. Simulation results show the superior performance of the proposed adaptive scheme, with respect to direct teleoperation, particularly in terms of increasing the stability margin and of significantly ameliorating transparency in the presence of large time delays. Experimental results, using a phantom omni as the haptic master device, support this conclusion. |
2007 |
Nikos C. Mitsou, Costas S. Tzafestas Temporal Occupancy Grid for mobile robot dynamic environment mapping Conference 2007 Mediterranean Conference on Control and Automation, MED, 2007, ISBN: 142441282X. Abstract | BibTeX | Links: [PDF] @conference{Mitsou2007, title = {Temporal Occupancy Grid for mobile robot dynamic environment mapping}, author = { Nikos C. Mitsou and Costas S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Temporal_Occupancy_Grid_for_mobile_robot_dynamic_environment_mapping.pdf}, doi = {10.1109/MED.2007.4433892}, isbn = {142441282X}, year = {2007}, date = {2007-07-01}, booktitle = {2007 Mediterranean Conference on Control and Automation, MED}, abstract = {Mapping dynamic environments is an open issue in the field of robotics. In this paper, we extend the well known Occupancy Grid structure to address the problem of generating valid maps for dynamic indoor environments. We propose a spatiotemporal access method to store all sensor values (instead of preserving only one value for each cell as in the common occupancy grid case). By searching for similar time series, we can detect moving objects that appear only in a limited number of possible configurations (e.g. doors or chairs). Simulated experiments demonstrate the potentialities of the proposed system.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Mapping dynamic environments is an open issue in the field of robotics. In this paper, we extend the well known Occupancy Grid structure to address the problem of generating valid maps for dynamic indoor environments. We propose a spatiotemporal access method to store all sensor values (instead of preserving only one value for each cell as in the common occupancy grid case). By searching for similar time series, we can detect moving objects that appear only in a limited number of possible configurations (e.g. doors or chairs). Simulated experiments demonstrate the potentialities of the proposed system. |
Nikos Mitsou, Costas Tzafestas Maximum likelihood SLAM in dynamic environments Conference Proceedings - International Conference on Tools with Artificial Intelligence, ICTAI, 1 , 2007, ISSN: 10823409. Abstract | BibTeX | Links: [PDF] @conference{Mitsou2007b, title = {Maximum likelihood SLAM in dynamic environments}, author = { Nikos Mitsou and Costas Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Maximum_Likelihood_SLAM_in_Dynamic_Environments.pdf}, doi = {10.1109/ICTAI.2007.168}, issn = {10823409}, year = {2007}, date = {2007-01-01}, booktitle = {Proceedings - International Conference on Tools with Artificial Intelligence, ICTAI}, volume = {1}, pages = {152--156}, abstract = {Simultaneous Localization and Mapping in dynamic environments is an open issue in the field of robotics. Traditionally, the related approaches assume that the environment remains static during the robot's exploration phase. In this work, we overcome this assumption and propose an algorithm that exploits the dynamic nature of the environment during robot exploration so as to improve the localization process. We use a Histogram Grid to store all the past occupancy values of every cell and thus to select the most probable pose of the robot based on the occupancy evolution. Experiments on a simulated robot indicate the effectiveness of the proposed approach.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Simultaneous Localization and Mapping in dynamic environments is an open issue in the field of robotics. Traditionally, the related approaches assume that the environment remains static during the robot's exploration phase. In this work, we overcome this assumption and propose an algorithm that exploits the dynamic nature of the environment during robot exploration so as to improve the localization process. We use a Histogram Grid to store all the past occupancy values of every cell and thus to select the most probable pose of the robot based on the occupancy evolution. Experiments on a simulated robot indicate the effectiveness of the proposed approach. |
2006 |
Costas S Tzafestas, Nektaria Palaiologou, Manthos Alifragis Virtual and remote robotic laboratory: Comparative experimental evaluation Journal Article IEEE Transactions on Education, 49 (3), pp. 360–369, 2006, ISSN: 00189359. Abstract | BibTeX | Links: [PDF] @article{3_64, title = {Virtual and remote robotic laboratory: Comparative experimental evaluation}, author = {Costas S Tzafestas and Nektaria Palaiologou and Manthos Alifragis}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Virtual_and_remote_robotic_laboratory_comparative_experimental_evaluation.pdf}, doi = {10.1109/TE.2006.879255}, issn = {00189359}, year = {2006}, date = {2006-01-01}, journal = {IEEE Transactions on Education}, volume = {49}, number = {3}, pages = {360--369}, abstract = {This paper describes the development and experimental evaluation of an e-laboratory platform in the field of robotics. The system in its current configuration is designed to enable distance training of students in real scenarios of robot manipulator programming. From a technological perspective, the research work presented in this paper is directed towards the adaptation of concepts and techniques developed in the field of telerobotics and virtual reality, and their integration in such e-laboratory settings. This paper focuses particularly on the educational impact of such systems. The goal is to assess the performance of e-laboratory scenarios in terms of the efficacy of training provided to students. The results of a pilot experimental study are presented, providing a comparative evaluation for three training modalities: real, remote, and virtual training on robot manipulator programming. The experiments were conducted according to an evaluation protocol specially designed for the considered target training task, using scoring charts to obtain quantitative performance measures and assess the performance of the student groups participating in the course. Training, as a dynamic process, is approached according to a classical three dimensional model, and performance scores are accordingly assessed in these dimensions (namely: low-level versus mid and high-level skills and understanding). The obtained results reveal certain differences between the three groups, particularly as related to the low-level skill training score, giving some insight about the training `dimensions' that are expected to be mostly affected by the absence of physical (or realistic virtual) presence in a real hands-on experimentation. Statistical analysis indicates, however, that, despite these apparent differences, such e-laboratory modules can be integrated quite effectively in practical scenarios, creating virtual training environments that can provide adequate learning elements, as related p-$backslash$n-$backslash$narticularly to mid and high-level skill acquisition. Further work and large-scale studies are still needed, though, in order to explore the extent to which such a general conclusion is valid in different training settings, and to form the basis of a more theoretical evaluation for a comprehensive understanding of the pedagogical differences between real, virtual, and remote learning/training methodologies and experiences}, keywords = {}, pubstate = {published}, tppubtype = {article} } This paper describes the development and experimental evaluation of an e-laboratory platform in the field of robotics. The system in its current configuration is designed to enable distance training of students in real scenarios of robot manipulator programming. From a technological perspective, the research work presented in this paper is directed towards the adaptation of concepts and techniques developed in the field of telerobotics and virtual reality, and their integration in such e-laboratory settings. This paper focuses particularly on the educational impact of such systems. The goal is to assess the performance of e-laboratory scenarios in terms of the efficacy of training provided to students. The results of a pilot experimental study are presented, providing a comparative evaluation for three training modalities: real, remote, and virtual training on robot manipulator programming. The experiments were conducted according to an evaluation protocol specially designed for the considered target training task, using scoring charts to obtain quantitative performance measures and assess the performance of the student groups participating in the course. Training, as a dynamic process, is approached according to a classical three dimensional model, and performance scores are accordingly assessed in these dimensions (namely: low-level versus mid and high-level skills and understanding). The obtained results reveal certain differences between the three groups, particularly as related to the low-level skill training score, giving some insight about the training `dimensions' that are expected to be mostly affected by the absence of physical (or realistic virtual) presence in a real hands-on experimentation. Statistical analysis indicates, however, that, despite these apparent differences, such e-laboratory modules can be integrated quite effectively in practical scenarios, creating virtual training environments that can provide adequate learning elements, as related p-$backslash$n-$backslash$narticularly to mid and high-level skill acquisition. Further work and large-scale studies are still needed, though, in order to explore the extent to which such a general conclusion is valid in different training settings, and to form the basis of a more theoretical evaluation for a comprehensive understanding of the pedagogical differences between real, virtual, and remote learning/training methodologies and experiences |
Nikos C. Mitsou, Spyros V. Velanas, Costas S. Tzafestas Visuo-haptic interface for teleoperation of mobile robot exploration tasks Conference Proceedings - IEEE International Workshop on Robot and Human Interactive Communication, 2006, ISSN: 1-4244-0565-3. Abstract | BibTeX | Links: [PDF] @conference{Mitsou2006, title = {Visuo-haptic interface for teleoperation of mobile robot exploration tasks}, author = { Nikos C. Mitsou and Spyros V. Velanas and Costas S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Visuo-Haptic_Interface_for_Teleoperation_of_Mobile_Robot_Exploration_Tasks.pdf}, doi = {10.1109/ROMAN.2006.314411}, issn = {1-4244-0565-3}, year = {2006}, date = {2006-09-01}, booktitle = {Proceedings - IEEE International Workshop on Robot and Human Interactive Communication}, pages = {157--163}, abstract = {With the spread of low-cost haptic devices, haptic interfaces appear in many areas in the field of robotics. Recently, haptic devices have been used in the field of mobile robot teleoperation, where mobile robots operate in unknown and dangerous environments performing particular tasks. Haptic feedback is shown to improve operator perception of the environment without, however, improving exploration time. In this paper, we present a haptic interface that is used to teleoperate a mobile robot in exploring polygonal environments. The proposed visuo-haptic interface is found to improve navigation time and operator perception of the remote environment. The human-operator can simultaneously select two different commands, the first one being set as "active" motion command, while the second one is set as a "guarded" motion type of navigation command. The user can feel a haptic equivalent for both types of teleguidance motion commands, and can also observe in real-time the sequential creation of the remote environment map. Comparative evaluation experiments show that the proposed system makes the task of remote navigation of unknown environments easier}, keywords = {}, pubstate = {published}, tppubtype = {conference} } With the spread of low-cost haptic devices, haptic interfaces appear in many areas in the field of robotics. Recently, haptic devices have been used in the field of mobile robot teleoperation, where mobile robots operate in unknown and dangerous environments performing particular tasks. Haptic feedback is shown to improve operator perception of the environment without, however, improving exploration time. In this paper, we present a haptic interface that is used to teleoperate a mobile robot in exploring polygonal environments. The proposed visuo-haptic interface is found to improve navigation time and operator perception of the remote environment. The human-operator can simultaneously select two different commands, the first one being set as "active" motion command, while the second one is set as a "guarded" motion type of navigation command. The user can feel a haptic equivalent for both types of teleguidance motion commands, and can also observe in real-time the sequential creation of the remote environment map. Comparative evaluation experiments show that the proposed system makes the task of remote navigation of unknown environments easier |
I Kaklamanos A Vezakis G Polymeneas G Bonatsos Κ. Birbas C. Tzafestas Spatial ability can predict laparoscopic skill performance of novice surgeons Conference 10th World Congress of Endoscopic Surgery and 14th International Congress of the European Association for Endoscopic Surgery (EAES), Β$epsilon$$rho$ο$łambda$ί$nu$ο, 13-16 Sept. 2006., 2006. @conference{46b, title = {Spatial ability can predict laparoscopic skill performance of novice surgeons}, author = { I Kaklamanos A Vezakis G Polymeneas G Bonatsos {Κ. Birbas C. Tzafestas}}, year = {2006}, date = {2006-01-01}, booktitle = {10th World Congress of Endoscopic Surgery and 14th International Congress of the European Association for Endoscopic Surgery (EAES), Β$epsilon$$rho$ο$łambda$ί$nu$ο, 13-16 Sept. 2006.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
D Christopoulos I Kaklamanos G Bonatsos Κ. Birbas C. Tzafestas Virtual paracentesis simulator (DEX): impact of haptic interaction on the learning curve Conference 10th World Congress of Endoscopic Surgery and 14th International Congress of the European Association for Endoscopic Surgery (EAES), Β$epsilon$$rho$ο$łambda$ί$nu$ο, 13-16 Sept. 2006., 2006. @conference{47b, title = {Virtual paracentesis simulator (DEX): impact of haptic interaction on the learning curve}, author = { D Christopoulos I Kaklamanos G Bonatsos {Κ. Birbas C. Tzafestas}}, year = {2006}, date = {2006-01-01}, booktitle = {10th World Congress of Endoscopic Surgery and 14th International Congress of the European Association for Endoscopic Surgery (EAES), Β$epsilon$$rho$ο$łambda$ί$nu$ο, 13-16 Sept. 2006.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2005 |
N Palaiologou, C Tzafestas Training scenarios for students on virtual and remote robotic laboratory platforms Journal Article 2005. @article{4_50, title = {Training scenarios for students on virtual and remote robotic laboratory platforms}, author = {N Palaiologou and C Tzafestas}, url = {https://imanagerpublications.com/assets/htmlfiles/JFET()957.html }, year = {2005}, date = {2005-01-01}, keywords = {}, pubstate = {published}, tppubtype = {article} } |
CS Tzafestas, N Palalologou, M Alifragis Experimental evaluation and pilot assessment study of a virtual and remote laboratory on robotic manipulation Conference IEEE International Symposium on Industrial Electronics (ISIE'05), p.1677-1683, Dubrovnik, Croatia, Jun 20-23, 2005, 2005, ISBN: 0-7803-8738-4. Abstract | BibTeX | Links: [PDF] @conference{Tzafestas2005, title = {Experimental evaluation and pilot assessment study of a virtual and remote laboratory on robotic manipulation}, author = { CS Tzafestas and N Palalologou and M Alifragis}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/ISIE2005_Tzafestas_Palaiologou.pdf}, isbn = {0-7803-8738-4}, year = {2005}, date = {2005-01-01}, booktitle = {IEEE International Symposium on Industrial Electronics (ISIE'05), p.1677-1683, Dubrovnik, Croatia, Jun 20-23, 2005}, pages = {1677--1683}, abstract = {Practical training in experimental laboratory scenarios is indeed of great importance since mere lecturing is not sufficient enough to complete students' education in many engineering disciplines. Synchronous and asynchronous distance learning platforms have many advantages such as attending courses from a distance (e.g. in virtual classroom environments). However remote “elaboratory” systems are just now beginning to develop. In this paper, the development of a “virtual and remote laboratory platform” in the field of robotics and the methodology of its experimental evaluation are discussed. In the past, in our prior work [10], a first pilot experimental study was conducted according to a special evaluation protocol, in order to evaluate system performance regarding remotely training students to program robot manipulation tasks using the robot's Teach Pendant. The results of the first pilot study are encouraging enough. In this paper, we are focusing on the methodology of the evaluation protocol and discuss ways to extend this study amongst three groups: group-I trained the “classical way” on the real robot, group-II (remote) trained remotely on the graphical user interface of the remote laboratory platform, and group-III (virtual) also trained on the user interface, but using only the “virtual robot” functionalities of the platform with no remote real robot connection on the loop. Initial results are showing the need for developing real training scenarios in the frame of remote laboratory education aiming to achieve effective learning schemes for students in the engineering field.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Practical training in experimental laboratory scenarios is indeed of great importance since mere lecturing is not sufficient enough to complete students' education in many engineering disciplines. Synchronous and asynchronous distance learning platforms have many advantages such as attending courses from a distance (e.g. in virtual classroom environments). However remote “elaboratory” systems are just now beginning to develop. In this paper, the development of a “virtual and remote laboratory platform” in the field of robotics and the methodology of its experimental evaluation are discussed. In the past, in our prior work [10], a first pilot experimental study was conducted according to a special evaluation protocol, in order to evaluate system performance regarding remotely training students to program robot manipulation tasks using the robot's Teach Pendant. The results of the first pilot study are encouraging enough. In this paper, we are focusing on the methodology of the evaluation protocol and discuss ways to extend this study amongst three groups: group-I trained the “classical way” on the real robot, group-II (remote) trained remotely on the graphical user interface of the remote laboratory platform, and group-III (virtual) also trained on the user interface, but using only the “virtual robot” functionalities of the platform with no remote real robot connection on the loop. Initial results are showing the need for developing real training scenarios in the frame of remote laboratory education aiming to achieve effective learning schemes for students in the engineering field. |
K Birbas C. Tzafestas Haptic Interaction in Simulating the Paracentesis of Great Vessels for Clinical Skill Enhancement Conference WorldHaptics'2005, First Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Pisa, Italy March 18-20, 2005, 2005. @conference{52b, title = {Haptic Interaction in Simulating the Paracentesis of Great Vessels for Clinical Skill Enhancement}, author = { K Birbas {C. Tzafestas}}, year = {2005}, date = {2005-01-01}, booktitle = {WorldHaptics'2005, First Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Pisa, Italy March 18-20, 2005}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
John N. Karigiannis, Costas S. Tzafestas Multi-agent architecture with continuous reinforcement learning in fuzzy state-space for robot manipulation control Conference International Conference on Integrated Modeling and Analysis in Applied Control and Automation, IMAACA 2005, Held at the International Mediterranean Modeling Multiconference, I3M 2005, 2005. Abstract | BibTeX | Links: [Webpage] @conference{50b, title = {Multi-agent architecture with continuous reinforcement learning in fuzzy state-space for robot manipulation control}, author = { John N. Karigiannis and Costas S. Tzafestas}, url = {http://www.scopus.com/inward/record.url?eid=2-s2.0-84899464150&partnerID=tZOtx3y1}, year = {2005}, date = {2005-01-01}, booktitle = {International Conference on Integrated Modeling and Analysis in Applied Control and Automation, IMAACA 2005, Held at the International Mediterranean Modeling Multiconference, I3M 2005}, pages = {31--39}, abstract = {In the context of multi-agent systems, we are proposing a distributed robot control architecture that comprises artificial intelligence (AI) techniques and traditional control methodologies, based on the realization of a learning team of agents in a continuous problem setting. In a multi-agent system, action selection is important for cooperation and coordination among the agents. By employing reinforcement learning (RL) methods in a fuzzified state-space, we accomplish to design a control methodology, engaged in a continuous space, which enables the agents to learn, over a period of time, to perform sequences of continuous actions in a cooperative manner, in order to reach their goal without any prior knowledge of the task. The agents, corresponding to independent degrees of freedom of the system, achieve to gain experience over the task that they collaboratively perform, by exploring and exploiting their state-to-action mapping space. Although the first set of experiments for evaluating our methodology has been performed on a simulated planar 2 degrees of freedom (dof) manipulator, we anticipate that such an approach is highly scalable to the control of robotic systems that are kinematically more complex, comprising multiple dofs and potentially redundancies in open or closed kinematic chains, particularly dexterous manipulators.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } In the context of multi-agent systems, we are proposing a distributed robot control architecture that comprises artificial intelligence (AI) techniques and traditional control methodologies, based on the realization of a learning team of agents in a continuous problem setting. In a multi-agent system, action selection is important for cooperation and coordination among the agents. By employing reinforcement learning (RL) methods in a fuzzified state-space, we accomplish to design a control methodology, engaged in a continuous space, which enables the agents to learn, over a period of time, to perform sequences of continuous actions in a cooperative manner, in order to reach their goal without any prior knowledge of the task. The agents, corresponding to independent degrees of freedom of the system, achieve to gain experience over the task that they collaboratively perform, by exploring and exploiting their state-to-action mapping space. Although the first set of experiments for evaluating our methodology has been performed on a simulated planar 2 degrees of freedom (dof) manipulator, we anticipate that such an approach is highly scalable to the control of robotic systems that are kinematically more complex, comprising multiple dofs and potentially redundancies in open or closed kinematic chains, particularly dexterous manipulators. |
2004 |
C S Tzafestas, Y Koumpouros, K Birbas Paracentesis modeling and VR-based interactive simulation with haptic display for clinical skill training and assessment Conference in Proceedings of The International Conference on Integrated Modeling & Analysis in Applied Control & Automation (IMAACA'2004), Special Session on: Virtual Reality and Haptics for Modeling, Design and Interactive Simulation. I3M: International Mediterranean Modeling Multiconference, Genoa, Italy, October 28-31 2004, 2004. @conference{Tzafestas2003, title = {Paracentesis modeling and VR-based interactive simulation with haptic display for clinical skill training and assessment}, author = { C S Tzafestas and Y Koumpouros and K Birbas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/IMAACA_Haptics02_final.pdf}, year = {2004}, date = {2004-10-01}, booktitle = {in Proceedings of The International Conference on Integrated Modeling & Analysis in Applied Control & Automation (IMAACA'2004), Special Session on: Virtual Reality and Haptics for Modeling, Design and Interactive Simulation. I3M: International Mediterranean Modeling Multiconference, Genoa, Italy, October 28-31 2004}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
C. S. Tzafestas, Y. Koumpouros, K. Birbas Haptic interaction in VR-based paracentesis simulation for dexterity enhancement and assessment Conference International Congress Series, 1268 (C), 2004, ISSN: 05315131. Abstract | BibTeX | Links: [PDF] @conference{Tzafestas2004b, title = {Haptic interaction in VR-based paracentesis simulation for dexterity enhancement and assessment}, author = { C. S. Tzafestas and Y. Koumpouros and K. Birbas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Haptic_Tzafestas_2004.pdf}, doi = {10.1016/j.ics.2004.03.254}, issn = {05315131}, year = {2004}, date = {2004-06-01}, booktitle = {International Congress Series}, volume = {1268}, number = {C}, pages = {413--418}, abstract = {In this paper, we describe the development of an interactive virtual reality (VR) system that aims to realistically simulate specific paracentesis clinical procedures (particularly the procedure involved in the catheterization of the subclavian vein). A simplified elasto-static finite-element model is used for the physically based simulation of the deformable tissues, particularly skin deflection during needle insertion. The VR-based simulation is being coupled with a haptic feedback device to provide to the user realistic feeling of the interaction forces applied during the simulated paracentesis procedure. The system described is developed in the frames of a research project aiming to develop a larger-scale virtual environment simulator of emergency room (ER) scenarios and protocols for clinical skill training and assessment. textcopyright 2004, CARS and Elsevier B.V. All rights reserved.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } In this paper, we describe the development of an interactive virtual reality (VR) system that aims to realistically simulate specific paracentesis clinical procedures (particularly the procedure involved in the catheterization of the subclavian vein). A simplified elasto-static finite-element model is used for the physically based simulation of the deformable tissues, particularly skin deflection during needle insertion. The VR-based simulation is being coupled with a haptic feedback device to provide to the user realistic feeling of the interaction forces applied during the simulated paracentesis procedure. The system described is developed in the frames of a research project aiming to develop a larger-scale virtual environment simulator of emergency room (ER) scenarios and protocols for clinical skill training and assessment. textcopyright 2004, CARS and Elsevier B.V. All rights reserved. |
CS Tzafestas, M Alifragis Development and experimental evaluation of a remote laboratory platform for teaching robot manipulator programming Conference Proc. Int. Conf. łdots, (c), 2004. @conference{54b, title = {Development and experimental evaluation of a remote laboratory platform for teaching robot manipulator programming}, author = { CS Tzafestas and M Alifragis}, url = {http://ineer.org/Events/ICEE2004/Proceedings/Abstracts/307_ICEE_2004_abstract_ktzaf_(1).pdf}, year = {2004}, date = {2004-01-01}, booktitle = {Proc. Int. Conf. łdots}, number = {c}, pages = {1--5}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
C S Tzafestas Y Koumpouros G Bonatsos K. Birbas I.G. Kaklamanos Dexterity enhancement and assessment of training in paracentesis of great vessels by using a virtual reality based interactive system (DEX system) Conference (poster), 90th Annual Clinical Congress, American College of Surgeons, October 10-14, 2004, New Orleans, LA, USA, 2004. @conference{53b, title = {Dexterity enhancement and assessment of training in paracentesis of great vessels by using a virtual reality based interactive system (DEX system)}, author = { C S Tzafestas Y Koumpouros G Bonatsos {K. Birbas I.G. Kaklamanos}}, year = {2004}, date = {2004-01-01}, booktitle = {(poster), 90th Annual Clinical Congress, American College of Surgeons, October 10-14, 2004, New Orleans, LA, USA}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
C S Tzafestas, M Alifragis, N Palaiologou, S.C.A Thomopoulos, A -E Exarchou, A Kroys, R Kunicke Virtual Robotic Laboratory : Applying web-based teleoperation technologies to distance training in robot manipulator programming Conference Rev 2004: 1st International Conference on Remote Engineering and Virtual Instrumentation, 2004. @conference{Tzafestas2004, title = {Virtual Robotic Laboratory : Applying web-based teleoperation technologies to distance training in robot manipulator programming}, author = { C S Tzafestas and M Alifragis and N Palaiologou and S.C.A Thomopoulos and A -E Exarchou and A Kroys and R Kunicke}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Virtual_Robotic_Laboratory_Applying_web.pdf}, year = {2004}, date = {2004-01-01}, booktitle = {Rev 2004: 1st International Conference on Remote Engineering and Virtual Instrumentation}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2003 |
Costas S Tzafestas Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation Journal Article IEEE Transactions on Systems, Man, and Cybernetics Part A:Systems and Humans., 33 (1), pp. 100–113, 2003, ISSN: 10834427. Abstract | BibTeX | Links: [PDF] @article{0_49, title = {Whole-Hand Kinesthetic Feedback and Haptic Perception in Dextrous Virtual Manipulation}, author = {Costas S Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/publications/Tzafestas_TSMC-A-2003_01206459.pdf}, doi = {10.1109/TSMCA.2003.812600}, issn = {10834427}, year = {2003}, date = {2003-01-01}, journal = {IEEE Transactions on Systems, Man, and Cybernetics Part A:Systems and Humans.}, volume = {33}, number = {1}, pages = {100--113}, abstract = {One of the key requirements for a Virtual Reality system is the multimodal, real-time interaction between the human operator and a computer simulated and animated environment. This paper investigates problems related particularly to the haptic interaction between the human operator and a virtual environment. The work presented here focuses on two issues: 1) the synthesis of whole-hand kinesthetic feedback, based on the application of forces (torques) on individual phalanges (joints) of the human hand, and 2) the experimental evaluation of this haptic feedback system, in terms of human haptic perception of virtual physical properties (such as the weight of a virtual manipulated object), using psychophysical methods. The proposed kinesthetic feedback methodology is based on the solution of a generalized force distribution problem for the human hand during virtual manipulation tasks. The solution is computationally efficient and has been experimentally implemented using an exoskeleton force-feedback glove. A series of experiments is reported concerning the perception of weight of manipulated virtual objects and the obtained results demonstrate the feasibility of the concept. Issues related to the use of sensory substitution techniques for the application of haptic feedback on the human hand are also discussed.}, keywords = {}, pubstate = {published}, tppubtype = {article} } One of the key requirements for a Virtual Reality system is the multimodal, real-time interaction between the human operator and a computer simulated and animated environment. This paper investigates problems related particularly to the haptic interaction between the human operator and a virtual environment. The work presented here focuses on two issues: 1) the synthesis of whole-hand kinesthetic feedback, based on the application of forces (torques) on individual phalanges (joints) of the human hand, and 2) the experimental evaluation of this haptic feedback system, in terms of human haptic perception of virtual physical properties (such as the weight of a virtual manipulated object), using psychophysical methods. The proposed kinesthetic feedback methodology is based on the solution of a generalized force distribution problem for the human hand during virtual manipulation tasks. The solution is computationally efficient and has been experimentally implemented using an exoskeleton force-feedback glove. A series of experiments is reported concerning the perception of weight of manipulated virtual objects and the obtained results demonstrate the feasibility of the concept. Issues related to the use of sensory substitution techniques for the application of haptic feedback on the human hand are also discussed. |
2002 |
Costas S Tzafestas, Petros Maragos Shape connectivity: Multiscale analysis and application to generalized granulometries Journal Article Journal of Mathematical Imaging and Vision, 17 (2), pp. 109–129, 2002, ISSN: 09249907. Abstract | BibTeX | Links: [PDF] @article{117, title = {Shape connectivity: Multiscale analysis and application to generalized granulometries}, author = {Costas S Tzafestas and Petros Maragos}, url = {http://robotics.ntua.gr/wp-content/uploads/publications/TzafestasMaragos_ShapeConnectMscale_JMIV2002.pdf}, doi = {10.1023/A:1020629402912}, issn = {09249907}, year = {2002}, date = {2002-01-01}, journal = {Journal of Mathematical Imaging and Vision}, volume = {17}, number = {2}, pages = {109--129}, abstract = {This paper develops a multiscale connectivity theory for shapes based on the axiomatic definition of new generalized connectivity measures, which are obtained using morphology-based nonlinear scale-space operators. The concept of connectivity-tree for hierarchical image representation is introduced and used to define generalized connected morphological operators. This theoretical framework is then applied to establish a class of generalized granulometries, implemented at a particular problem concerning soilsection image analysis and evaluation of morphological properties such as size distributions. Comparative results demonstrate the power and versatility of the proposed methodology with respect to the application of typical connected operators (such as reconstruction openings). This multiscale connectivity analysis framework aims at a more reliable evaluation of shape/size information within complex images, with particular applications to generalized granulometries, connected operators, and segmentation.}, keywords = {}, pubstate = {published}, tppubtype = {article} } This paper develops a multiscale connectivity theory for shapes based on the axiomatic definition of new generalized connectivity measures, which are obtained using morphology-based nonlinear scale-space operators. The concept of connectivity-tree for hierarchical image representation is introduced and used to define generalized connected morphological operators. This theoretical framework is then applied to establish a class of generalized granulometries, implemented at a particular problem concerning soilsection image analysis and evaluation of morphological properties such as size distributions. Comparative results demonstrate the power and versatility of the proposed methodology with respect to the application of typical connected operators (such as reconstruction openings). This multiscale connectivity analysis framework aims at a more reliable evaluation of shape/size information within complex images, with particular applications to generalized granulometries, connected operators, and segmentation. |
2001 |
S.G. Tzafestas P.A. Prokopiou, C S Tzafestas A New Partitioned Robot Neurocontroller: General Analysis and Application to Teleoperator Modeling Uncertainties Compensation Journal Article 2001. @article{6_49, title = {A New Partitioned Robot Neurocontroller: General Analysis and Application to Teleoperator Modeling Uncertainties Compensation}, author = {S.G. Tzafestas P.A. Prokopiou and C S Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/A_new_partitioned_robot_neurocontroller.pdf}, year = {2001}, date = {2001-01-01}, keywords = {}, pubstate = {published}, tppubtype = {article} } |
C S Tzafestas, S G Tzafestas Full-State Modeling, Motion Planning and Control of Mobile Manipulators Journal Article 2001. @article{5_41, title = {Full-State Modeling, Motion Planning and Control of Mobile Manipulators}, author = {C S Tzafestas and S G Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Full_state_modeling_motion_planning_and.pdf}, year = {2001}, date = {2001-01-01}, keywords = {}, pubstate = {published}, tppubtype = {article} } |
Costas S. Tzafestas Teleplanning by human demonstration for VR-based teleoperation of a mobile robotic assistant Conference Proceedings - IEEE International Workshop on Robot and Human Interactive Communication, 2001, ISBN: 0780372220. Abstract | BibTeX | Links: [PDF] @conference{Tzafestas2001, title = {Teleplanning by human demonstration for VR-based teleoperation of a mobile robotic assistant}, author = { Costas S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/teleplanning-by-human-demonstration-for-vrbased-teleoperation-of.pdf}, doi = {10.1109/ROMAN.2001.981947}, isbn = {0780372220}, year = {2001}, date = {2001-09-01}, booktitle = {Proceedings - IEEE International Workshop on Robot and Human Interactive Communication}, pages = {462--467}, abstract = {Focuses on the integration of local path planning techniques in a multimodal teleoperation interface, for the efficient remote control of a mobile robotic assistant. The main principle underlying this scheme is related to finding new ways to establish an efficient human-robot cooperation framework, where humans and robots take charge of the parts of the tasks that they can perform more efficiently. For the teleoperation of a mobile robotic platform, a simple application of this general principle could be to commit the human operator in performing the necessary global planning operations, which are more demanding in terms of complex reasoning and required "intelligence", while other more local tasks such as collision avoidance and trajectory optimization are dedicated to the telerobotic system. We propose an implementation of this principle within a mobile robot teleoperation interface integrating virtual reality techniques and Web standards. The paper describes the multimodal interface and the design principles followed, as well as the integration of a local path planning method. This scheme, called "computer-assisted teleplanning by human demonstration", aims at providing active assistance to the human operator, enabling him to indicate in a natural way the desired global motion plan, for a more efficient teleoperation of a mobile robotic assistant}, keywords = {}, pubstate = {published}, tppubtype = {conference} } Focuses on the integration of local path planning techniques in a multimodal teleoperation interface, for the efficient remote control of a mobile robotic assistant. The main principle underlying this scheme is related to finding new ways to establish an efficient human-robot cooperation framework, where humans and robots take charge of the parts of the tasks that they can perform more efficiently. For the teleoperation of a mobile robotic platform, a simple application of this general principle could be to commit the human operator in performing the necessary global planning operations, which are more demanding in terms of complex reasoning and required "intelligence", while other more local tasks such as collision avoidance and trajectory optimization are dedicated to the telerobotic system. We propose an implementation of this principle within a mobile robot teleoperation interface integrating virtual reality techniques and Web standards. The paper describes the multimodal interface and the design principles followed, as well as the integration of a local path planning method. This scheme, called "computer-assisted teleplanning by human demonstration", aims at providing active assistance to the human operator, enabling him to indicate in a natural way the desired global motion plan, for a more efficient teleoperation of a mobile robotic assistant |
C S Tzafestas, S G Tzafestas Mobile Manipulators: Full-State Modeling, Motion Planning and Control Conference 17th Intl. Conference on CAD/CAM, Robotics and the Factories of the Future (CARS & FOF '2001), Durban, South Africa, July 2001, 2001. @conference{59b, title = {Mobile Manipulators: Full-State Modeling, Motion Planning and Control}, author = { C S Tzafestas and S G Tzafestas}, year = {2001}, date = {2001-01-01}, booktitle = {17th Intl. Conference on CAD/CAM, Robotics and the Factories of the Future (CARS & FOF '2001), Durban, South Africa, July 2001}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
C S Tzafestas Multimodal Teleoperation Interface integrating VR Models for a Mobile Robotic Assistant Conference Proc. 10th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD'2001), Vienna, Austria, May 16-18, 2001, 2001. @conference{60b, title = {Multimodal Teleoperation Interface integrating VR Models for a Mobile Robotic Assistant}, author = { C S Tzafestas}, year = {2001}, date = {2001-01-01}, booktitle = {Proc. 10th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD'2001), Vienna, Austria, May 16-18, 2001}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
A. Sofou, C. Tzafestas, P. Maragos SEGMENTATION OF SOILSECTION IMAGES USING CONNECTED OPERATORS Conference Proc. Int'l Conf. on Image Processing (ICIP-2001), Thessaloniki, Greece, Oct. 2001, 2001, ISBN: 0780367251. @conference{254, title = {SEGMENTATION OF SOILSECTION IMAGES USING CONNECTED OPERATORS}, author = {A. Sofou and C. Tzafestas and P. Maragos}, url = {http://robotics.ntua.gr/wp-content/uploads/publications/SofouTzafestasMaragos_SoilSegmentConnectivity_ICIP2001.pdf}, isbn = {0780367251}, year = {2001}, date = {2001-01-01}, booktitle = {Proc. Int'l Conf. on Image Processing (ICIP-2001), Thessaloniki, Greece, Oct. 2001}, pages = {1087--1090}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
2000 |
C S Tzafestas, P A Prokopiou, S G Tzafestas A differential motion planning algorithm for controlling multi-robot systems handling a common object Journal Article Control and Cybernetics, 29 (2), pp. 566–584, 2000, ISSN: 03248569. Abstract | BibTeX | Links: [PDF] @article{7_51, title = {A differential motion planning algorithm for controlling multi-robot systems handling a common object}, author = {C S Tzafestas and P A Prokopiou and S G Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/A_differential_motion_planning_algo.pdf}, issn = {03248569}, year = {2000}, date = {2000-01-01}, journal = {Control and Cybernetics}, volume = {29}, number = {2}, pages = {566--584}, abstract = {Multi-robot systems have substantially increased capabilities over single-robot systems and can handle very large or peculiar objects. This paper presents a differential (incremental) motion planning algorithm for an m-robot system (m ≥ 2) to cooperatively transfer an object from an initial to a desired final position / orientation by rigidly holding it at given respective points Q 1 , Q 2 , . . . , Q m . One of the robots plays the role of a "master" while other robots operate in the "slave" mode maintaining invariant their relative positions and orientations during the system motion. The method employs the differential displacements of the end-effector of each robot arm. Then, the differential displacements of the joints of the m robots are computed for the application of incremental motion control. The algorithm was tested on many examples. A representative of them is shown here, concerning the case of three STAUBLI RX-90L robots similar to 6-dof PUMA robots. The results obtained show the practicality and effectiveness of the method, which, however, needs particular care for completely eliminating the cumulative errors that may occur.}, keywords = {}, pubstate = {published}, tppubtype = {article} } Multi-robot systems have substantially increased capabilities over single-robot systems and can handle very large or peculiar objects. This paper presents a differential (incremental) motion planning algorithm for an m-robot system (m ≥ 2) to cooperatively transfer an object from an initial to a desired final position / orientation by rigidly holding it at given respective points Q 1 , Q 2 , . . . , Q m . One of the robots plays the role of a "master" while other robots operate in the "slave" mode maintaining invariant their relative positions and orientations during the system motion. The method employs the differential displacements of the end-effector of each robot arm. Then, the differential displacements of the joints of the m robots are computed for the application of incremental motion control. The algorithm was tested on many examples. A representative of them is shown here, concerning the case of three STAUBLI RX-90L robots similar to 6-dof PUMA robots. The results obtained show the practicality and effectiveness of the method, which, however, needs particular care for completely eliminating the cumulative errors that may occur. |
C S Tzafestas, Ph Coiffet Dexterous haptic interaction with virtual environments: hand-distributed kinesthetic feedback and haptic perception Journal Article 38 (2), pp. 433–476, 2000, ISSN: 02329298. @article{8_47, title = {Dexterous haptic interaction with virtual environments: hand-distributed kinesthetic feedback and haptic perception}, author = {C S Tzafestas and Ph Coiffet}, issn = {02329298}, year = {2000}, date = {2000-01-01}, volume = {38}, number = {2}, pages = {433--476}, abstract = {One of the key characteristics of a general Virtual Reality (VR) system is the multimodal, real-time interaction between the human operator and the computer simulated and animated environment. This paper deals more particularly with problems related to the haptic interaction between the human operator and a virtual environment (VE). The general goal of such a system can be seen as that of integrating the functionality of the human hand within a virtual world. Maintaining the dexterity and prehensile skills of the human operator within such applications implies the use of an anthropomorphic device which has enough degrees of freedom while being capable of monitoring the actions of the human hand and fingers. Such an exoskeleton glove device (the LRP hand master) has been recently developed in our laboratory and integrated in an interactive virtual prehension system. This paper focuses more particularly on two issues: (a) the synthesis of hand-distributed kinesthetic feedback to be applied on the fingers, and (b) the experimental evaluation of this haptic feedback system based on psychophysical methods. A series of experiments is reported here concerning the perception of the weight of manipulated virtual objects. Issues related to the use of sensory substitution techniques for the application of haptic feedback on the human hand are also discussed.}, keywords = {}, pubstate = {published}, tppubtype = {article} } One of the key characteristics of a general Virtual Reality (VR) system is the multimodal, real-time interaction between the human operator and the computer simulated and animated environment. This paper deals more particularly with problems related to the haptic interaction between the human operator and a virtual environment (VE). The general goal of such a system can be seen as that of integrating the functionality of the human hand within a virtual world. Maintaining the dexterity and prehensile skills of the human operator within such applications implies the use of an anthropomorphic device which has enough degrees of freedom while being capable of monitoring the actions of the human hand and fingers. Such an exoskeleton glove device (the LRP hand master) has been recently developed in our laboratory and integrated in an interactive virtual prehension system. This paper focuses more particularly on two issues: (a) the synthesis of hand-distributed kinesthetic feedback to be applied on the fingers, and (b) the experimental evaluation of this haptic feedback system based on psychophysical methods. A series of experiments is reported here concerning the perception of the weight of manipulated virtual objects. Issues related to the use of sensory substitution techniques for the application of haptic feedback on the human hand are also discussed. |
Costas S Tzafestas, Dimitris Valatsos VR-based Teleoperation of a Mobile Robotic Assistant : Progress Report Conference in Proc: European Workshop on Service and Humanoid Robots (Servicerob'2001), pp.51-56, Santorini, Greece, 2001, (c), 2000. @conference{Tzafestas2000, title = {VR-based Teleoperation of a Mobile Robotic Assistant : Progress Report}, author = { Costas S Tzafestas and Dimitris Valatsos}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/KTzaf_DEMO_2000_13.pdf}, year = {2000}, date = {2000-11-01}, booktitle = {in Proc: European Workshop on Service and Humanoid Robots (Servicerob'2001), pp.51-56, Santorini, Greece, 2001}, number = {c}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
Petros Maragos, Giorgos Stamou, Spyros Tzafestas A lattice control model of fuzzy dynamical systems in state-space ∗ Conference in Mathematical Morphology and Its Application to Image and Signal Processing, J. Goutsias, L. Vincent and D. Bloomberg, Editors, Kluwer Academic Publishers, Boston, 2000, pp. 61--70, 70 (ii), 2000. @conference{260, title = {A lattice control model of fuzzy dynamical systems in state-space ∗}, author = { Petros Maragos and Giorgos Stamou and Spyros Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/publications/MaragosStamouTzafestas_LatControlFuzzySyst_ISMM2000.pdf}, year = {2000}, date = {2000-01-01}, booktitle = {in Mathematical Morphology and Its Application to Image and Signal Processing, J. Goutsias, L. Vincent and D. Bloomberg, Editors, Kluwer Academic Publishers, Boston, 2000, pp. 61--70}, volume = {70}, number = {ii}, pages = {61--70}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
C. S. Tzafestas, Ph Coiffet Dexterous haptic interaction with virtual environments: hand-distributed kinesthetic feedback and haptic perception Conference Proc. IARP First International Workshop on Humanoid and Human Friendly Robotics, Tsukuba, Japan, October 26-27, 1998, 38 (2), 2000, ISSN: 02329298. @conference{64b, title = {Dexterous haptic interaction with virtual environments: hand-distributed kinesthetic feedback and haptic perception}, author = { C. S. Tzafestas and Ph Coiffet}, issn = {02329298}, year = {2000}, date = {2000-01-01}, booktitle = {Proc. IARP First International Workshop on Humanoid and Human Friendly Robotics, Tsukuba, Japan, October 26-27, 1998}, volume = {38}, number = {2}, pages = {433--476}, abstract = {One of the key characteristics of a general Virtual Reality (VR) system is the multimodal, real-time interaction between the human operator and the computer simulated and animated environment. This paper deals more particularly with problems related to the haptic interaction between the human operator and a virtual environment (VE). The general goal of such a system can be seen as that of integrating the functionality of the human hand within a virtual world. Maintaining the dexterity and prehensile skills of the human operator within such applications implies the use of an anthropomorphic device which has enough degrees of freedom while being capable of monitoring the actions of the human hand and fingers. Such an exoskeleton glove device (the LRP hand master) has been recently developed in our laboratory and integrated in an interactive virtual prehension system. This paper focuses more particularly on two issues: (a) the synthesis of hand-distributed kinesthetic feedback to be applied on the fingers, and (b) the experimental evaluation of this haptic feedback system based on psychophysical methods. A series of experiments is reported here concerning the perception of the weight of manipulated virtual objects. Issues related to the use of sensory substitution techniques for the application of haptic feedback on the human hand are also discussed.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } One of the key characteristics of a general Virtual Reality (VR) system is the multimodal, real-time interaction between the human operator and the computer simulated and animated environment. This paper deals more particularly with problems related to the haptic interaction between the human operator and a virtual environment (VE). The general goal of such a system can be seen as that of integrating the functionality of the human hand within a virtual world. Maintaining the dexterity and prehensile skills of the human operator within such applications implies the use of an anthropomorphic device which has enough degrees of freedom while being capable of monitoring the actions of the human hand and fingers. Such an exoskeleton glove device (the LRP hand master) has been recently developed in our laboratory and integrated in an interactive virtual prehension system. This paper focuses more particularly on two issues: (a) the synthesis of hand-distributed kinesthetic feedback to be applied on the fingers, and (b) the experimental evaluation of this haptic feedback system based on psychophysical methods. A series of experiments is reported here concerning the perception of the weight of manipulated virtual objects. Issues related to the use of sensory substitution techniques for the application of haptic feedback on the human hand are also discussed. |
1999 |
Costas S. Tzafestas, Spyros G. Tzafestas Recent algorithms for fuzzy and neurofuzzy path planning and navigation of autonomous mobile robots Conference Systems Science, 25 (2), 1999, ISSN: 01371223. Abstract | BibTeX | Links: [PDF] @conference{Tzafestas1999, title = {Recent algorithms for fuzzy and neurofuzzy path planning and navigation of autonomous mobile robots}, author = { Costas S. Tzafestas and Spyros G. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/tzafestas1999.pdf}, issn = {01371223}, year = {1999}, date = {1999-08-01}, booktitle = {Systems Science}, volume = {25}, number = {2}, pages = {25--39}, abstract = {textcopyright 1999 EUCA. This paper reviews a number of recent algorithms for mobile robot path planning, navigation and motion control, which employ fuzzy logic and neuro-fuzzy learning and reasoning. Starting with a discussion of the structure of fuzzy and neuro-fuzzy systems, two fuzzy obstacle avoidance path planning algorithms are presented followed by a 3-level neuro-fuzzy local and global path planning scheme. Then the motion planning and control problem is considered. A fuzzy path tracking strategy is outlined, followed by a fuzzy navigation algorithm among polygonal obstacles and a learning-by-doing neuro-fuzzy motion planning scheme. The paper ends with a hybrid robust motion control technique which combines the minimum interference and sliding mode control principles with fuzzy inference. A representative set of examples are included which illustrate the performance of the algorithms under various realistic conditions.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } textcopyright 1999 EUCA. This paper reviews a number of recent algorithms for mobile robot path planning, navigation and motion control, which employ fuzzy logic and neuro-fuzzy learning and reasoning. Starting with a discussion of the structure of fuzzy and neuro-fuzzy systems, two fuzzy obstacle avoidance path planning algorithms are presented followed by a 3-level neuro-fuzzy local and global path planning scheme. Then the motion planning and control problem is considered. A fuzzy path tracking strategy is outlined, followed by a fuzzy navigation algorithm among polygonal obstacles and a learning-by-doing neuro-fuzzy motion planning scheme. The paper ends with a hybrid robust motion control technique which combines the minimum interference and sliding mode control principles with fuzzy inference. A representative set of examples are included which illustrate the performance of the algorithms under various realistic conditions. |
S G Tzafestas, C S Tzafestas Virtual Reality in Telerobotics: The State-of-the-Art Conference Proc. IEEE Intl. Symposium on Industrial Electronics (ISIE'99), Bled, Slovenia, July 12-16, 1999, 1999. @conference{Tzafestas1999b, title = {Virtual Reality in Telerobotics: The State-of-the-Art}, author = { S G Tzafestas and C S Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/virtual-reality-in-telerobotics-the-stateoftheart.pdf}, year = {1999}, date = {1999-07-01}, booktitle = {Proc. IEEE Intl. Symposium on Industrial Electronics (ISIE'99), Bled, Slovenia, July 12-16, 1999}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
P Maragos, S G Tzafestas Min-Max Control with Application to Discrete Event Dynamic Systems Book Chapter Advances in Manufacturing, pp. 217–230, Springer London, London, 1999, ISBN: 978-1-4471-0855-9. Abstract | BibTeX | Links: [PDF] @inbook{Maragos1999b, title = {Min-Max Control with Application to Discrete Event Dynamic Systems}, author = {P Maragos and S G Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/1999_MaragosTzafestas_MinmaxControlApplicDEDS_BookChap_Springer.pdf}, isbn = {978-1-4471-0855-9}, year = {1999}, date = {1999-01-01}, booktitle = {Advances in Manufacturing}, pages = {217--230}, publisher = {Springer London}, address = {London}, abstract = {Large classes of dynamic phenomena such as material flow in manufacturing systems, traffic flow in transportation or communication networks, and related scheduling problems can be viewed as discrete event dynamical systems (DEDS); see the papers in [7] for surveys. An efficient approach [3,9] to model large classes of DEDS has been based on the minimax algebra [4] and describes the time dynamics of such DEDS by using nonlinear state space equations which algebraically resemble the linear (sum-product) equations of linear control but in which the addition and multiplication have been replaced by maximum and addition, respectively}, keywords = {}, pubstate = {published}, tppubtype = {inbook} } Large classes of dynamic phenomena such as material flow in manufacturing systems, traffic flow in transportation or communication networks, and related scheduling problems can be viewed as discrete event dynamical systems (DEDS); see the papers in [7] for surveys. An efficient approach [3,9] to model large classes of DEDS has been based on the minimax algebra [4] and describes the time dynamics of such DEDS by using nonlinear state space equations which algebraically resemble the linear (sum-product) equations of linear control but in which the addition and multiplication have been replaced by maximum and addition, respectively |
1998 |
Costas S Tzafestas, Platon A Prokopiou, Spyros G Tzafestas Path Planning and Control of a Cooperative Three-Robot System Manipulating Large Objects Journal Article Journal of Intelligent and Robotic Systems: Theory and Applications, 22 (2), pp. 99–116, 1998, ISSN: 09210296. Abstract | BibTeX | Links: [PDF] @article{11b, title = {Path Planning and Control of a Cooperative Three-Robot System Manipulating Large Objects}, author = {Costas S Tzafestas and Platon A Prokopiou and Spyros G Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/A_1007943632269.pdf}, doi = {10.1023/A:1007943632269}, issn = {09210296}, year = {1998}, date = {1998-01-01}, journal = {Journal of Intelligent and Robotic Systems: Theory and Applications}, volume = {22}, number = {2}, pages = {99--116}, abstract = {After a brief review of the current research on multi-robot systems, the paper presents a path planning and control scheme for a cooperative three-robot system transferring/manipulating a large object from an initial to a desired final position/orientation. The robots are assumed to be capable of holding the object at three points that define an isosceles triangle. The mode of operation adopted is that of a "master-and-two-slave robots". The control scheme employs the differential displacement of the object which is transformed into that of the end-effector of each robotic arm, and then used to compute the differential displacements of the joints of the robots. The scheme was applied to several 3-robot systems by simulation and proved to be adequately effective, subject to certain conditions regarding the magnitude of the differential displacements. Here, an example is included which concerns the case of three Staubli RX-90L robots.}, keywords = {}, pubstate = {published}, tppubtype = {article} } After a brief review of the current research on multi-robot systems, the paper presents a path planning and control scheme for a cooperative three-robot system transferring/manipulating a large object from an initial to a desired final position/orientation. The robots are assumed to be capable of holding the object at three points that define an isosceles triangle. The mode of operation adopted is that of a "master-and-two-slave robots". The control scheme employs the differential displacement of the object which is transformed into that of the end-effector of each robotic arm, and then used to compute the differential displacements of the joints of the robots. The scheme was applied to several 3-robot systems by simulation and proved to be adequately effective, subject to certain conditions regarding the magnitude of the differential displacements. Here, an example is included which concerns the case of three Staubli RX-90L robots. |
A Kheddar, C Tzafestas Fitting tele-operation and virtual reality technologies towards teleworking Conference FIR'98, 4th French-Israeli łdots, 1998. BibTeX | Links: [Webpage] [PDF] @conference{Kheddar1998, title = {Fitting tele-operation and virtual reality technologies towards teleworking}, author = { A Kheddar and C Tzafestas}, url = {http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.45.2873&rep=rep1&type=pdf http://robotics.ntua.gr/wp-content/uploads/sites/2/Kheddar_FIR98.pdf}, year = {1998}, date = {1998-05-01}, booktitle = {FIR'98, 4th French-Israeli łdots}, pages = {147--152}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
1997 |
Costas S Tzafestas, Nacer K M'Sirdi, N Manamani Adaptive Impedance Control Applied to a Pneumatic Legged Robot Journal Article Journal of Intelligent & Robotic Systems, 20 (2), pp. 105–129, 1997, ISSN: 0921-0296. Abstract | BibTeX | Links: [PDF] @article{13b, title = {Adaptive Impedance Control Applied to a Pneumatic Legged Robot}, author = {Costas S Tzafestas and Nacer K M'Sirdi and N Manamani}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/TzafestasC_Adaptive_1997.pdf}, doi = {10.1023/A:1007987608963}, issn = {0921-0296}, year = {1997}, date = {1997-01-01}, journal = {Journal of Intelligent & Robotic Systems}, volume = {20}, number = {2}, pages = {105--129}, abstract = {An adaptive impedance control scheme with estimation of robot andenvironment parameters is proposed in this paper. It consists of two stagesof adaptation and control. The first one performs an on-line estimation ofthe robot inertial parameters, during the complete (constrained or not)motion of the leg, while the second one compensates for the uncertainties onthe characteristics of the ground (position and stiffness). Simulationresults obtained for a single leg of a pneumatic driven, quadruped robotshow the effectiveness of the proposed control scheme in case ofconsiderable uncertainty both in the robot and ground parameters.}, keywords = {}, pubstate = {published}, tppubtype = {article} } An adaptive impedance control scheme with estimation of robot andenvironment parameters is proposed in this paper. It consists of two stagesof adaptation and control. The first one performs an on-line estimation ofthe robot inertial parameters, during the complete (constrained or not)motion of the leg, while the second one compensates for the uncertainties onthe characteristics of the ground (position and stiffness). Simulationresults obtained for a single leg of a pneumatic driven, quadruped robotshow the effectiveness of the proposed control scheme in case ofconsiderable uncertainty both in the robot and ground parameters. |
S G a Tzafestas, T E a Krikochoritis, C S b Tzafestas Robust Sliding-mode Control of Nine-link Biped Robot Walking Journal Article Journal of Intelligent and Robotic Systems: Theory and Applications, 20 (2-4), pp. 375–402, 1997, ISSN: 09210296. Abstract | BibTeX | Links: [Webpage] [PDF] @article{12b, title = {Robust Sliding-mode Control of Nine-link Biped Robot Walking}, author = {S G a Tzafestas and T E a Krikochoritis and C S b Tzafestas}, url = {http://www.scopus.com/inward/record.url?eid=2-s2.0-0031250682&partnerID=40&md5=f38e59558dfc6492f0513f105db7b4cf http://robotics.ntua.gr/wp-content/uploads/sites/2/TzafestasS_KrikochoritisT_TzafestasC_RobustSliding-modeControlNineLinkBipedRobotWalk_1997-1.pdf}, doi = {Doi 10.1023/A:1007924731253}, issn = {09210296}, year = {1997}, date = {1997-01-01}, journal = {Journal of Intelligent and Robotic Systems: Theory and Applications}, volume = {20}, number = {2-4}, pages = {375--402}, abstract = {A nine-link planar biped robot model is considered which, in addition to the main links (i.e., legs, thighs and trunk), includes a two-segment foot. First, a continuous walking pattern of the biped on a flat terrain is synthesized, and the corresponding desired trajectories of the robot joints are calculated. Next, the kinematic and dynamic equations that describe its locomotion during the various walking phases are briefly presented. Finally, a nonlinear robust control approach is followed, motivated by the fact that the control which has to guarantee the stability of the biped robot must take into account its exact nonlinear dynamics. However, an accurate model of the biped robot is not available in practice, due to the existence of uncertainties of various kinds such as unmodeled dynamics and parameter inaccuracies. Therefore, under the assumption that the estimation error on the unknown (probably time-varying) parameters is bounded by a given function, a sliding-mode controller is applied, which provies a successful way to preserve stability and achieve good performance, despite the presence of strong modeling imprecisions or uncertainties. The paper includes a set of representative simulation results that demonstrate the very good behavior of the sliding-mode robust biped controller.}, keywords = {}, pubstate = {published}, tppubtype = {article} } A nine-link planar biped robot model is considered which, in addition to the main links (i.e., legs, thighs and trunk), includes a two-segment foot. First, a continuous walking pattern of the biped on a flat terrain is synthesized, and the corresponding desired trajectories of the robot joints are calculated. Next, the kinematic and dynamic equations that describe its locomotion during the various walking phases are briefly presented. Finally, a nonlinear robust control approach is followed, motivated by the fact that the control which has to guarantee the stability of the biped robot must take into account its exact nonlinear dynamics. However, an accurate model of the biped robot is not available in practice, due to the existence of uncertainties of various kinds such as unmodeled dynamics and parameter inaccuracies. Therefore, under the assumption that the estimation error on the unknown (probably time-varying) parameters is bounded by a given function, a sliding-mode controller is applied, which provies a successful way to preserve stability and achieve good performance, despite the presence of strong modeling imprecisions or uncertainties. The paper includes a set of representative simulation results that demonstrate the very good behavior of the sliding-mode robust biped controller. |
A. Kheddar, C. Tzafestas, P. Coiffet The hidden robot concept-high level abstraction teleoperation Conference Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems. Innovative Robotics for Real-World Applications. IROS '97, 3 , 1997, ISBN: 0-7803-4119-8. Abstract | BibTeX | Links: [Webpage] [PDF] @conference{Kheddar1997, title = {The hidden robot concept-high level abstraction teleoperation}, author = { A. Kheddar and C. Tzafestas and P. Coiffet}, url = {http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=656609 http://robotics.ntua.gr/wp-content/uploads/sites/2/the-hidden-robot-concepthigh-level-abstraction-teleoperation.pdf}, doi = {10.1109/IROS.1997.656609}, isbn = {0-7803-4119-8}, year = {1997}, date = {1997-09-01}, booktitle = {Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems. Innovative Robotics for Real-World Applications. IROS '97}, volume = {3}, pages = {1818--1825}, abstract = {This paper discusses the development of new teleoperator systems. While many innovations during the last decade made teleoperation technology progress, some severe well known lacks that we enumerate still persist. With respect to some attractive solutions proposed for coping with these problems we designed a bilateral control scheme based on what we called the hidden robot concept. The teleoperator achieves tasks manually in a natural way within a virtual environment (VE). Thanks to suitable bilateral transformations, the virtual tasks are being reproduced by any slave robot within the remote site. Mainly task based, our approach is not considered like a high level task knowledge based control. Rather, we consider it like a more refined shared autonomy control with a high level abstraction interface. Three main components are developed: (i) supervision loop, (ii) bilateral transformation layer, (iii) execution loop. The approach has been validated experimentally and preliminary results as well as further work are discussed}, keywords = {}, pubstate = {published}, tppubtype = {conference} } This paper discusses the development of new teleoperator systems. While many innovations during the last decade made teleoperation technology progress, some severe well known lacks that we enumerate still persist. With respect to some attractive solutions proposed for coping with these problems we designed a bilateral control scheme based on what we called the hidden robot concept. The teleoperator achieves tasks manually in a natural way within a virtual environment (VE). Thanks to suitable bilateral transformations, the virtual tasks are being reproduced by any slave robot within the remote site. Mainly task based, our approach is not considered like a high level task knowledge based control. Rather, we consider it like a more refined shared autonomy control with a high level abstraction interface. Three main components are developed: (i) supervision loop, (ii) bilateral transformation layer, (iii) execution loop. The approach has been validated experimentally and preliminary results as well as further work are discussed |
P Coiffet A. Kheddar C. Tzafestas, I Mazon C Laugier & R Chellali T. Kotoku K. Tanie Parallel, Multi-Robot Long-Distance Teleoperation Conference Proc. 1997 IEEE International Conference on Advanced Robotics (ICAR'97), pp.1007-1012, Monterey, CA, USA, July 7-9, 1997, 1997. @conference{Tzafestas}1997, title = {Parallel, Multi-Robot Long-Distance Teleoperation}, author = { P Coiffet {A. Kheddar C. Tzafestas} and I Mazon C Laugier {&} R Chellali {T. Kotoku K. Tanie}}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/parallel-multirobots-long-distance-teleoperation.pdf}, year = {1997}, date = {1997-07-01}, booktitle = {Proc. 1997 IEEE International Conference on Advanced Robotics (ICAR'97), pp.1007-1012, Monterey, CA, USA, July 7-9, 1997}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
Spyros G. Tzafestas, Platon A. Prokopiou, Costas S. Tzafestas Telemanipulator neurocontrol using multiple RBF networks Conference IEEE International Symposium on Intelligent Control - Proceedings, 1997. Abstract | BibTeX | Links: [PDF] @conference{Tzafestas1997b, title = {Telemanipulator neurocontrol using multiple RBF networks}, author = { Spyros G. Tzafestas and Platon A. Prokopiou and Costas S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/telemanipulator-neurocontrol-using-multiple-rbf-networks.pdf}, year = {1997}, date = {1997-07-01}, booktitle = {IEEE International Symposium on Intelligent Control - Proceedings}, abstract = {This paper addresses the control problem of master-slave systems which involve severe modeling errors and other high - level uncertainties, using Neural Networks. The solution approach is based on a recent teleoperator control scheme (S. Lee and H. S. Lee), which is suitably enhanced such that to become capable of compensating the uncertainties. The class of radial-basis functions (RBF) neural networks are employed in a multipartitioned neural network architecture, and a special learning scheme is adopted which distributes the learning error to each subnetwork and allows on-line learning. The effectiveness of the present RBF neurocontroller was investigated through extensive simulation and compared to that of MLP (multi-layer perceptron) neurocontroller and a robust sliding-mode controller representative.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } This paper addresses the control problem of master-slave systems which involve severe modeling errors and other high - level uncertainties, using Neural Networks. The solution approach is based on a recent teleoperator control scheme (S. Lee and H. S. Lee), which is suitably enhanced such that to become capable of compensating the uncertainties. The class of radial-basis functions (RBF) neural networks are employed in a multipartitioned neural network architecture, and a special learning scheme is adopted which distributes the learning error to each subnetwork and allows on-line learning. The effectiveness of the present RBF neurocontroller was investigated through extensive simulation and compared to that of MLP (multi-layer perceptron) neurocontroller and a robust sliding-mode controller representative. |
S. G. Tzafestas, P. A. Prokopiou, C. S. Tzafestas Robust telemanipulator control using a partitioned neural network architecture Conference IEEE International Conference on Neural Networks - Conference Proceedings, 3 , 1997, ISSN: 10987576. Abstract | BibTeX | Links: [PDF] @conference{Tzafestas1997b, title = {Robust telemanipulator control using a partitioned neural network architecture}, author = { S. G. Tzafestas and P. A. Prokopiou and C. S. Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/robust-telemanipulator-control-using-a-partitioned-neural-networ.pdf}, doi = {10.1109/ICNN.1997.614161}, issn = {10987576}, year = {1997}, date = {1997-06-01}, booktitle = {IEEE International Conference on Neural Networks - Conference Proceedings}, volume = {3}, pages = {1755--1760}, abstract = {In this paper the control problem of telemanipulators is considered under the condition that they are subject to modeling and other uncertainties of considerable levels. The design is based on the S. Lee and H.S. Lee teleoperator control scheme (1993, 1994), which is modified so as to be able to compensate the uncertainties, and is implemented using a partitioned multilayer perceptron neural network. Several subnetworks are used each one identifying a term of the manipulator's dynamic model. A new learning algorithm is proposed which distributes the learning error to each subnetwork and enables online training. Several simulation results are provided, which show the robustness ability by the partitioned neurocontroller, and compare it with the results obtained through sliding mode control ER -}, keywords = {}, pubstate = {published}, tppubtype = {conference} } In this paper the control problem of telemanipulators is considered under the condition that they are subject to modeling and other uncertainties of considerable levels. The design is based on the S. Lee and H.S. Lee teleoperator control scheme (1993, 1994), which is modified so as to be able to compensate the uncertainties, and is implemented using a partitioned multilayer perceptron neural network. Several subnetworks are used each one identifying a term of the manipulator's dynamic model. A new learning algorithm is proposed which distributes the learning error to each subnetwork and enables online training. Several simulation results are provided, which show the robustness ability by the partitioned neurocontroller, and compare it with the results obtained through sliding mode control ER - |
Costas Tzafestas, Philippe Coiffet Computing optimal forces for generalized kinesthetic feedback on the human hand during virtual grasping and manipulation Conference Proceedings of the 1997 IEEE International Conference on Robotics and Automation, ICRA. Part 3 (of 4), 1 , 1997, ISSN: 10504729. Abstract | BibTeX | Links: [Webpage] [PDF] @conference{Tzafestas1997, title = {Computing optimal forces for generalized kinesthetic feedback on the human hand during virtual grasping and manipulation}, author = { Costas Tzafestas and Philippe Coiffet}, url = {https://www.scopus.com/inward/record.uri?eid=2-s2.0-0030689450&partnerID=40&md5=7af2ee142d6712b81d4055a125026bb1 http://robotics.ntua.gr/wp-content/uploads/sites/2/computing-optimal-forces-for-generalised-kinesthetic-feedback-on.pdf}, doi = {10.1109/ROBOT.1997.620025}, issn = {10504729}, year = {1997}, date = {1997-04-01}, booktitle = {Proceedings of the 1997 IEEE International Conference on Robotics and Automation, ICRA. Part 3 (of 4)}, volume = {1}, pages = {118--123}, abstract = {The paper focuses on the problem of force-feedback for the human-operator hand when manipulating virtual objects. We propose a method for the computation of feedback-forces that have to be applied on each individual phalanx and finger of the human hand in order to display pertinent, kinesthetic information about static or dynamic characteristics of objects present in the virtual scene. External forces and moments of the manipulated virtual objects have to be mapped on the contact-forces space of the virtual grasp. The method is based on the solution of a nonlinear programming problem, formulated by performing a static analysis of a general, multiple contact points virtual grasp. A methodology for modelling interactions within a virtual environment, and performing realistic grasping and manipulation, is also presented.}, keywords = {}, pubstate = {published}, tppubtype = {conference} } The paper focuses on the problem of force-feedback for the human-operator hand when manipulating virtual objects. We propose a method for the computation of feedback-forces that have to be applied on each individual phalanx and finger of the human hand in order to display pertinent, kinesthetic information about static or dynamic characteristics of objects present in the virtual scene. External forces and moments of the manipulated virtual objects have to be mapped on the contact-forces space of the virtual grasp. The method is based on the solution of a nonlinear programming problem, formulated by performing a static analysis of a general, multiple contact points virtual grasp. A methodology for modelling interactions within a virtual environment, and performing realistic grasping and manipulation, is also presented. |
P A Prokopiou C.S. Tzafestas S.G. Tzafestas Incremental Control of Three Cooperating Robots in Large-Object-Transfer Operations Conference Proc. 2nd MATHMOD: Mathematical Modeling IMACS Symposium, Vienna, Feb.5-7, 1997, 1997. @conference{67, title = {Incremental Control of Three Cooperating Robots in Large-Object-Transfer Operations}, author = { P A Prokopiou {C.S. Tzafestas S.G. Tzafestas}}, year = {1997}, date = {1997-01-01}, booktitle = {Proc. 2nd MATHMOD: Mathematical Modeling IMACS Symposium, Vienna, Feb.5-7, 1997}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
T E Krikochoritis S.G. Tzafestas, C S Tzafestas Robust and Adaptive Control of Biped Robot Walking Conference Proc. 1st MobiNet Symp. on Mobile Robotics Technology for Health Care Services (MOBINET'97), Athens, Greece, May 15-16, 271-286, 1997, 1997. @conference{71, title = {Robust and Adaptive Control of Biped Robot Walking}, author = { T E Krikochoritis {S.G. Tzafestas} and C S Tzafestas}, year = {1997}, date = {1997-01-01}, booktitle = {Proc. 1st MobiNet Symp. on Mobile Robotics Technology for Health Care Services (MOBINET'97), Athens, Greece, May 15-16, 271-286, 1997}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |
1996 |
A Kheddar, C Tzafestas, P Coiffet, T Kotoku, K Tanie Multi-robot teleoperation using direct human hand actions Journal Article Advanced Robotics, 11 (8), pp. 799–825, 1996, ISSN: 15685535. Abstract | BibTeX | Links: [PDF] @article{Kheddar1996, title = {Multi-robot teleoperation using direct human hand actions}, author = {A Kheddar and C Tzafestas and P Coiffet and T Kotoku and K Tanie}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/kheddar1996.pdf}, doi = {10.1163/156855398X00343}, issn = {15685535}, year = {1996}, date = {1996-01-01}, journal = {Advanced Robotics}, volume = {11}, number = {8}, pages = {799--825}, abstract = {This paper presents a novel concept for teleoperation using direct human hand(s) actions which we called 'the hidden robot' concept. The proposed teleoperation scheme is composed of three main components: the operator/ computer loop, the execution loop and between them the bilateral transformation modules linked by the communication channel. Within the operator/computer master loop, the operator performs what we call a 'virtual task', without being constrained by the slave robot. At this stage, the bilateral transformation layer is in charge of extracting, at the low level, pertinent parameters from the virtual task and transforming them onto robot control signals. The execution loop performs control of the slave robot(s) to achieve the desired task, described by the virtual one. At this stage, the transformation layer extracts pertinent data to provide feedback when possible and needed. It also makes sure that the task is being performed correctly in the real site; otherwise, it takes necessary recovery procedures or informs the operator to procede in a different way. We will describe in detail each component, highlighting the originalities of our approach. We will also present the experiment performed by applying this concept to long-distance, simultaneous teleoperation of four slave robots with different kinematics and situated at different locations in France and in Japan. The experimental task consisted of assembling a four-piece puzzle. All the robots had to perform the same task in parallel. We will discuss the experimental results presented in this paper, concering long-distance teleoperated robot control and round-trip communication time delay. The experiment demonstrated the feasibility of the proposed scheme and gave guidelines related to the direct use of the operator hand, within an intermediate representation, as a guide for task execution.}, keywords = {}, pubstate = {published}, tppubtype = {article} } This paper presents a novel concept for teleoperation using direct human hand(s) actions which we called 'the hidden robot' concept. The proposed teleoperation scheme is composed of three main components: the operator/ computer loop, the execution loop and between them the bilateral transformation modules linked by the communication channel. Within the operator/computer master loop, the operator performs what we call a 'virtual task', without being constrained by the slave robot. At this stage, the bilateral transformation layer is in charge of extracting, at the low level, pertinent parameters from the virtual task and transforming them onto robot control signals. The execution loop performs control of the slave robot(s) to achieve the desired task, described by the virtual one. At this stage, the transformation layer extracts pertinent data to provide feedback when possible and needed. It also makes sure that the task is being performed correctly in the real site; otherwise, it takes necessary recovery procedures or informs the operator to procede in a different way. We will describe in detail each component, highlighting the originalities of our approach. We will also present the experiment performed by applying this concept to long-distance, simultaneous teleoperation of four slave robots with different kinematics and situated at different locations in France and in Japan. The experimental task consisted of assembling a four-piece puzzle. All the robots had to perform the same task in parallel. We will discuss the experimental results presented in this paper, concering long-distance teleoperated robot control and round-trip communication time delay. The experiment demonstrated the feasibility of the proposed scheme and gave guidelines related to the direct use of the operator hand, within an intermediate representation, as a guide for task execution. |
Tzafestas C S S.G. Tzafestas M. Raibert Robust Sliding Mode Control Applied to a 5-link Biped Robot Journal Article 1996. @article{Raibert}1996, title = {Robust Sliding Mode Control Applied to a 5-link Biped Robot}, author = {Tzafestas C S {S.G. Tzafestas M. Raibert}}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/Tzafestas_RobusSlidinMode_1996.pdf}, year = {1996}, date = {1996-01-01}, keywords = {}, pubstate = {published}, tppubtype = {article} } |
C Tzafestas, P Coiffet Real-time collision detection using spherical octrees: virtual reality application Conference Robot and Human Communication, 1996., 5th IEEE International Workshop on, 1996, ISBN: 0780332539. Abstract | BibTeX | Links: [PDF] @conference{Tzafestas1996, title = {Real-time collision detection using spherical octrees: virtual reality application}, author = { C Tzafestas and P Coiffet}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/realtime-collision-detection-using-spherical-octrees-virtual-rea.pdf}, doi = {10.1109/ROMAN.1996.568888}, isbn = {0780332539}, year = {1996}, date = {1996-11-01}, booktitle = {Robot and Human Communication, 1996., 5th IEEE International Workshop on}, pages = {500--506}, abstract = {A method for detecting potential collisions between three-dimensional moving objects is described in this paper. An object-centered, spherical octree representation is defined and implemented for the localisation of potentially colliding features between polyhedral objects. These features are subsequently tested for intersection in order to calculate precisely the actual collision points. Application of the algorithm for the direct manipulation of objects in a virtual scene is considered, to investigate its real-time behaviour. The performance of the algorithm is found to remain linear with respect to the complexity of the colliding objects}, keywords = {}, pubstate = {published}, tppubtype = {conference} } A method for detecting potential collisions between three-dimensional moving objects is described in this paper. An object-centered, spherical octree representation is defined and implemented for the localisation of potentially colliding features between polyhedral objects. These features are subsequently tested for intersection in order to calculate precisely the actual collision points. Application of the algorithm for the direct manipulation of objects in a virtual scene is considered, to investigate its real-time behaviour. The performance of the algorithm is found to remain linear with respect to the complexity of the colliding objects |
1993 |
M Raibert, S Tzafestas, C Tzafestas Comparative simulation study of three control techniques applied to a biped robot Conference International Conference on Systems, Man and Cybernetics, Le Touquet, France, 1993. @conference{Raibert1993, title = {Comparative simulation study of three control techniques applied to a biped robot}, author = { M Raibert and S Tzafestas and C Tzafestas}, url = {http://robotics.ntua.gr/wp-content/uploads/sites/2/comparative-simulation-study-of-three-control-techniques-applied.pdf}, year = {1993}, date = {1993-10-01}, booktitle = {International Conference on Systems, Man and Cybernetics, Le Touquet, France}, pages = {494--502}, keywords = {}, pubstate = {published}, tppubtype = {conference} } |